

























|
ВВЕДЕНИЕ В данной курсовой работе была поставлена задача разработать устройство для измерения угла наклона оптического излучения. Целью данной работы является разработка целиком законченного устройства, которое способно полностью обеспечить решение поставленной задачи. В данной курсовой работе была поставлена задача разработать устройство для измерения угла наклона оптического излучения от ОКГ с длиной волны 0,63 мкм, мощностью излучения 2 мВт и диаметром пучка 2,5 мм.. Для реализации устройства необходимо произвести патентный поиск и путем анализа существующих аналогов выбрать наиболее подходящий. Далее разрабатывается функциональная схема устройства, рассчитываются элементы схемы, разрабатывается принципиальная электрическая схема а также конструкция самого устройства. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. Анализ существующих технических решений По данной теме курсового проекта был осуществлен патентный и библиографический поиск существующих решений. Существуют различные методики определения скорости угловых перемещений. Рассмотрим основные из них: 1. Патент № 1432332 - Устройство для измерения угла наклона Изобретение относится к геодезическому приборостроению, в частности к средствам контроля углового положения объектов. Целью изобретения является повышение точности измерений. Устройство содержит основание 1, кодовый диск 2,электродвигатель 3, излучатель 4 и фотоприёмник 5, связанный с rs-триггером 6. Источник напряжения связан с электродвигателем 3 через датчик 8 тока, подключенный к rs-триггеру 6 через формирователь импульсов 9. Постоянная составляющая выходного сигнала фильтруется фильтром 10 1 ил. Применять это устройство для поставленной нами задачи нецелесообразно, так как это устройство измеряет угол наклона вала. Подробное описание патента прилагается в приложении Е. 2. Патент № 1703969-Устройство для измерения угла наклона Изобретение относится к геодезическому приборостроению и может быть использовано для измерения углов наклона и эталонирования вертикальных кругов теодолитов. Целью изобретения является повышение точности за счёт уменьшения влияния ошибок гнутия зрительной трубы. Устройство содержит подставку, колонку, установленную с возможностью поворота вокруг вертикальной оси, зрительную трубу 2 с объективом 1, установленную в колонке с возможностью поворота вокруг горизонтальной оси 3, которая ортогональна визирной оси зрительной трубы 2 и пересечена с ней в главной точке 8, горизонтальный лимб с отсчетной системой, оптически сопряжённый с объективом 1, оптический блок с двумя каналами, оптические оси которых пересечены в главной точке 8 и расположены в одной плоскости с горизонтальной осью 3 симметрично относительно визирной оси 3 ил. Изобретение может измерять не только угол наклона, но и может быть использовано для эталонирования вертикальных кругов теодолитов. Точность определения угла наклона в нужном нам диапазоне (+/- 0.5 угл. мин.) падает, так как выполнить это условие практически невозможно из-за необходимости разделения визирного луча не симметричные, образующие близкий к 180 градусам угол, реализовать который устройством невозможно, потому что величина S становиться неоправданно большой. Подробное описание патента прилагается в приложении Е. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. Патент № 1714366 - Датчик угла наклона Изобретение относится к контрольно-измерительной технике, конкретно к устройствам измерения углов наклона объектов, и может быть использовано в системах начальной выставки. С целью повышения точности измерения углов отклонения объектов датчиков угла наклона рабочая жидкость выполнена в виде совокупности прозрачной и непрозрачной разноплотностых жидкостей, для чего вводится дополнительно прозрачная жидкость, плотность которой больше плотности непрозрачной жидкости, а светочувствительный элемент выполняется в виде объектива. 2 ил. Это устройство не подойдёт для выполнения поставленной задачи, потому что устройство обладает большим для нас недостатком- низкой точностью измерения угла, т.е. не сможет измерить угол наклона в диапазоне, который нам дан в исходных данных. Подробное описание патента прилагается в приложении Е. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Получается, что патентный поиск устройств (из уже существующих) не дал целесообразного решения для поставленной задачи, а значит придётся разработать устройство самостоятельно. Итак, я предлагаю на выходе лазера, под углом 45º поставить расщепитель, полупрозрачную пластинку (зеркало), которая отделит незначительную часть лазерного пучка. Получатся два ортогональных луча. Луч, изменивший своё направление будет падать на двух-координатный позиционно-чувствительный датчик с этого датчика сигнал после усиления будет поступать на аналоговоцифровой преобразователь вход микроконтроллера,где будет рассчитываться угол наклонапо. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
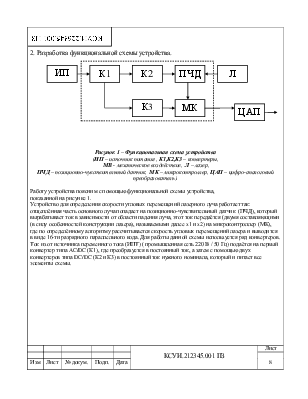
2. Разработка функциональной схемы устройства.
Рисунок 1 – Функциональная схема устройства (ИП – источник питания, К1,К2,К3 – конвертеры, МВ - механическое воздеёствие, Л – лазер, ПЧД – позиционно-чувствительный датчик, МК – микроконтроллер, ЦАП – цифро-аналоговый преобразователь). Работу устройства поясним с помощью функциональной схемы устройства, показанной на рисунке 1. Устройство для определения скорости угловых перемещений лазерного луча работает так: отщеплённая часть основного луча попадает на позиционно-чувствительный датчик (ПЧД), который вырабатывает ток в зависимости от области падения луча, этот ток передаётся (двумя составляющими (в силу особенностей конструкции лазера), называемыми далее x1 и x2) на микроконтроллер (МК), где по определённому алгоритму рассчитывается скорость угловых перемещений лазера и выводится в виде 16-ти разрядного параллельного кода. Для работы данной схемы используется ряд конвертеров. Ток из от источника переменного тока (ИПТ) ( промышленная сеть 220 В / 50 Гц) подаётся на первый конвертер типа AC/DC (К1), где преобразуется в постоянный ток, а затем с помощью двух конвертеров типа DC/DC (К2 и К3) в постоянный ток нужного номинала, который и питает все элементы схемы. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
8 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
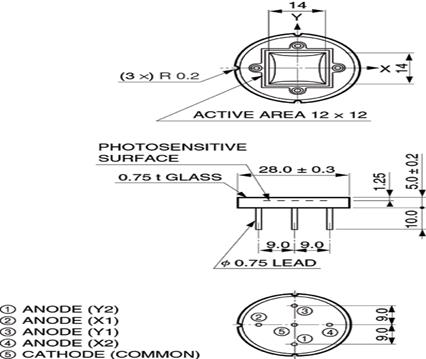
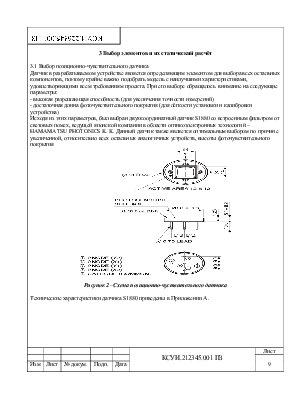
3 Выбор элементов и их статический расчёт 3.1 Выбор позиционно-чувствительного датчика Датчик в разрабатываемом устройстве является определяющим элементом для выбора всех остальных компонентов, поэтому крайне важно подобрать модель с наилучшими характеристиками, удовлетворяющими всем требованиям проекта. При его выборе обращалось внимание на следующие параметры: - высокая разрешающая способность (для увеличения точности измерений) - достаточная длина фоточувствительного покрытия (для лёгкости установки и калибровки устройства) Исходя из этих параметров, был выбран двухкоординатный датчик S1880 со встроенным фильтром от световых помех, ведущей японской компании в области оптикоэлектронных технологий – HAMAMATSU PHOTONICS K. K. Данный датчик также является оптимальным выбором по причине увеличенной, относительно всех остальных аналогичных устройств, высоты фоточувствительного покрытия
Рисунок 2 –Схема позиционно-чуствительного датчика Технические характеристики датчика S1880 приведены в Приложении А. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
9 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.2 Выбор микроконтроллера Микроконтроллер, который будет обеспечивать работу данного устройства должен удовлетворять следующим требованиям: - иметь параллельный (побитовый) 16-ти разрядный интерфейс для вывода данных; - обладать достаточной точностью вычислений Микроконтроллер ADuC812 идеально подходит для решения поставленной задачи. ADuC812 имеет 8 встроенных 12-ти разрядных АЦП, тем самым позволяя не использовать в разрабатываемом устройстве дополнительный внешний АЦП для конвертирования данных с сигнально моделирующего устройства датчика, достаточный объем FLASH памяти для выполнения поставленной задачи. Также данный микроконтроллер имеет достаточное количество ножек для вывода рассчитанной скорости угловых перемещений в виде 16-ти разрядного параллельного кода. Высокая частота колебаний кварца (11 МГц) также является важным критерием для выбора именно этого микроконтроллера. Технические характеристики ADuC812 приведены в Приложении Б. 3.3 Выбор цифро-аналогового преобразователя Для преобразования рассчитанного в микроконтроллере значения амплитуды в аналоговый сигнал необходимо подобрать ЦАП. Из огромного разнообразия ЦАП был выбран AD768 – 16-ти разрядный ЦАП с возможностью получения диапазона
выходного напряжения Данное устройство получает данные с микроконтроллера через параллельный 16-ти разрядный интерфейс. Также к достоинствам можно отнести низкое потребление электроэнергии. Технические характеристики AD768 приведены в Приложении В. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
10 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.4 Выбор конвертеров При выборе конвертеров учитывались следующие критерии: - достаточная мощность для обеспечения работы всех устройств, питаемых данным конвертором - необходимый диапазон входного и выходного напряжения Таким образом, сначала был выбран AC\DC конвертер TRACO POWER TMS 06112, который преобразует переменный ток (220 В / 50 Гц) в постоянные +12 В, а затем подбирались такие DC\DC конвертеры, чтобы входное значение напряжения было +12 В. Суммарная мощность двух выбранных DC\DC конвертеров равна мощности питающего их AC\DC конвертера и составляет 6 Ватт, что обеспечивает нормальную работу всех устройств включенных в схему, то есть суммарная всех потребляемая мощность устройств задействованных в схеме меньше 6 Ватт. Выходные значения напряжения DC\DC конвертеров должны соответствовать требуемым напряжениям питания устройств, которые они питают. Таким образом, были выбраны 2 DC\DC конвертера фирмы TRACO POWER: 1. TEN 5-1221 - DC\DC конвертер, входное напряжения +12 В,
выходное напряжение 2. TSM 1205S - DC\DC конвертер, входное напряжения +12 В, выходное напряжение +5 В, мощность – 1 Ватт, эффективность – 81%. В дополнение ко всему был выбран стабилизатор напряжения на 12 В - К142ЕН2А от отечественного производителя - фирмы КРЕН. Технические характеристики этих элементов приведены в Приложении Г. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.5 Расчёт потребляемых мощностей а) P(G1) P(G1) = P(AC\DC –TRACO POWER TMS 06112) = 6 Вт P(G2) = P(DC\DC – TRACO POWER TEN 5-1221) = 5 Вт P(G3) = P(DC\DC – TRACO POWER TSM 1205S) = 1 Вт P(G2) + P(G3) = 5 + 1 = 6 Вт = P(G1) б) P(G2) P(DA1) = P(OpAmp – Analog Devices AD8629) = I*U = 2*0.0011*5 = 11 мВт P(DA2) = P(OpAmp – Analog Devices OP484) = I*U = 3*0.00145*5 = 21.75 мВт P(DA3) = P(DA4) = P(OpAmp – Analog Devices AD817) = I*U = 0.0075*10 = 75 мВт P(DD2) = P(DAC – Analog Devices AD768) = 600 мВт P(BL1) = P(PSD – HAMAMATSU S3270) = I*U = 0.0003*5 = 15 мВт P(DA1) + P(DA2) + P(DA3) + P(DA4) + P(DD2) + P(BL1) = = 11+21.75+75*2+600+15 = 797.75 мВт
<< P(G2) = 6 Вт в) P(G3) P(DD1) = P(CPU – Analog Devices ADuC812) = I*U = 0.025*5 = 125 мВт P(DD1) << P(G3) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.6 Расчёт схемы предварительного усиления сигнала В технической документации к ПЧД Hamamatsu
S1880 показана схема предварительного усиления сигнала, там же
указана модель ОУ, которую нужно применять, а также диапазоны значений
резисторов и емкостей, включенных в ветвь обратной связи. Там же приведена
формула, по которой рассчитываются эти значения - Далее в соответствие с устройствами, необходимыми для устройства были выбраны остальные элементы схемы. Модели операционных усилителей, схема подачи опорного напряжения, резисторы, конденсаторы были подобраны в соответствии со схемами включения микроконтроллера и позиционно-чувствительного датчика, то есть в схемах включения данных элементов указывались какие модели операционных усилителей и какие типы и номинальные значения резисторов и емкостей нужно использовать. Так, например, в схеме включения ПЧД указывалось, что для усиления сигнала следует использовать модель операционных усилителей типа «ток в напряжение», а также были рассчитаны значения резисторов и емкостей. Таким образом, были выбраны все резисторы, конденсаторы и операционные усилители. Технические характеристики этих элементов приведены в Приложении Д. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
13 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 Разработка принципиальной схемы На плате А собраны следующие элементы: G1 – конвертер напряжения типа AC/DC который преобразует переменное напряжение питающей сети 220В в постоянное равное 18 вольтам. Стабилизатор напряжения DA3 стабилизирует напряжение подаваемое от конвертера G1. Конвертер G3 преобразует напряжение 18В в 5В с током в 100мА и служит для питания микроконтроллера. Конвертер G2 формирует напряжение +\- 5 В и ток в 500 мА и служит для питания ПЧД (BL1) и операционных усилителей (DA1 DA2). Сигнал с ПЧД (BL1) находящегося на плате Б проходит через серию операционных усилителей (DA1 DA2), где инвертируется и усиливается в соответствии с рекомендациями производителя. Далее сигнал попадает на вход микроконтроллера (DD1) со встроенным АЦП, в микроконтроллере по заданному алгоритму с этими данными производится расчёт после чего сигнал преобразуется с помощью ЦАП. Принципиальная схема прилагается. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
14 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
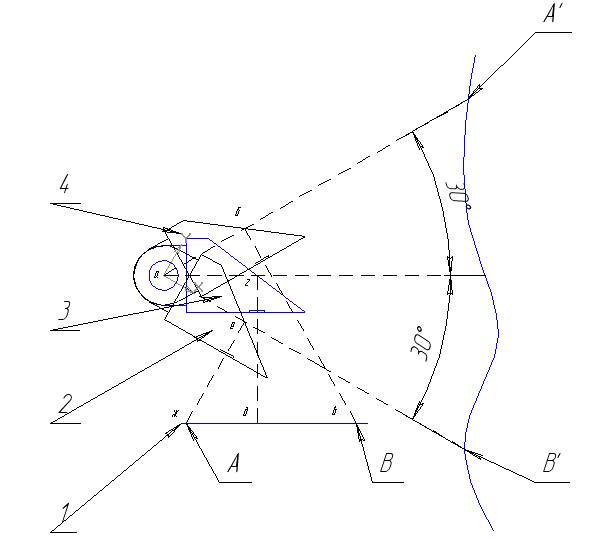
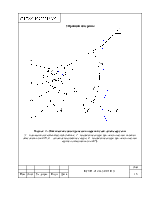
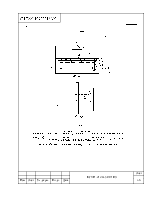
5 Принцип измерения
Рисунок 3 – Оптическая схема процесса измерений хода лучей вверх вниз (1 – позиционно-чувствительный датчик, 2 – положение лазера при максимальном нижнем отклонении (на 30º), 3 – основное положение лазера, 4 – положение лазера при максимальном верхнем отклонении (на 30º)). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
15 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
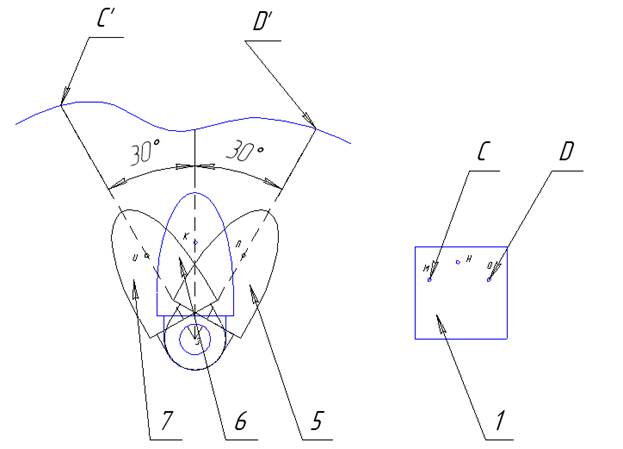
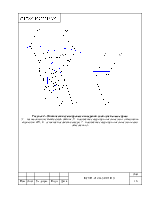
Рисунок 4 – Оптическая схема процесса измерений хода лучей влево вправо (1 – позиционно-чувствительный датчик, 5 – положение лазера при максимальном отклонении вправо (на 30º), 6 – основное положение лазера, 7 – положение лазера при максимальном влево отклонении,). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
16 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Принцип измерения основан на разделении лазерного пучка на 2 составляющие и регистрации отделённого пучка позиционно чувствительным датчиком. Для того чтобы наглядно показать процесс измерения хода лучей, построили две оптические схемы: ход лучей вверх-вниз и ход лучей влево-вправо. Рассмотрим, сначала оптическую схему хода лучей вверх-вниз Цифрой 1 на рисунке 3 отмечен позиционно чувствительный элемент. Цифрой 2 отмечено положение лазера, при максимально нижнем положении (на 30º), начальное положение излучателя (такое при котором он максимально отклонён в одну из сторон, в данном случае нижную),(из точки е в точку ж). При этом основной пучок проецируется на поверхность в точке В’ а отделённый в точку A на (ПЧД) (на начало чувствительной области). При этом расстояние от точки расщепления до точки A, назовём его R0, равно активной области датчика и в нашем случае (с использованием датчика S1880) равно 34мм. Цифрой 3 показано основное положении(из токи г в точку д). Цифрой 4 покажем максимальное отклонение (на 30º), ,только уже вверх. При этом основной луч проецируется на поверхность в точке А’, а на ПЧД в точке В (из точки б в точку в). Второй случай, когда измерение хода лучей происходит влево-вправо. Обозначим 1 – позиционно чувствительный элемент(датчик). Под цифрой 5 – положение лазера находится при максимальном отклонении вправо,попадая в точку П,преломляясь в точке М. Далее под цифрой 6- мы видим основное состоянии (положение датчика). И, наконец, под цифрой 7 – мы наблюдаем отклонение максимальное налево, когда в точке И попадает луч и преломляется в точке М. Здесь расстояние от точки расщепления луча до точки B, назовём его Rmax, увеличивается примерно до 48мм. Эта величина важна для расчётов скорости и её точное значение можно рассчитать по формуле 1. Она выводится исходя из известных углов и сторон по теореме синусов.
Чтобы динамически измерять Rx (расстояние от точки расщепления (о) до точки падения луча на датчик) выведем ещё одну формулу. При повороте излучателя из положения 2 в положение 3, Rx уменьшается с изменением угла поворота контура агв в положительном направлении (то есть против направления вращения часовой стрелки) и стремится к 12мм, тоесть к расстоянию аб. Поэтому мы будем прибавлять угол поворота к 45º, формула 2.
Определить сам угол поворота, несложно имея данные с датчика, для этого сначала найдём значение угла при повороте в отрицательном направлении, так как у датчика значения оси возрастают слева направо формула 3.
α – положительный угол поворота излучателя |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
17 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
А теперь найдём положительный угол поворота, формула 4.
Эти формулы потребуются для реализации алгоритма работы микроконтроллера. Используя эти данные мы сможем измерить линейное перемещение лазерного луча в горизонтальной плоскости (из точки A в точку B), которое будет эквивалентно его реальному перемещению (из точки A’ в точку B’) затем, динамически перемножая пройденный путь S на определённый интервал времени Tx и на радиус Rx мы получим значение угловой скорости. Величины, используемые в процессе измерений: Rmin – минимальное плечо (радиус) (аб) Rx – динамическое плечо (радиус) Rmax – максимальное плечо(радиус) (вг) α0 – отрицательный угол поворота излучателя α – положительный угол поворота излучателя |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
18 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 Алгоритм работы микроконтроллера 6.1 Блок-схема алгоритма
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
19 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7 Описание конструкции и установка устройства 7.1 Описание конструкции устройства Корпус устройства представляет собой металлическую коробку с двумя крышками. Размеры корпуса подбирались таким образом, чтобы внутри свободно помещались печатная плата с размещенными на ней элементами и также позиционно-чувствительный датчик. Крышки расположены с боковых сторон корпуса и крепятся к нему при помощи 8 винтов каждая – по четыре с каждой из двух сторон. На задней панели корпуса находится отверстие для подвода питания и проводов вывода сигнала. На передней панели корпуса находятся позиционно-чувствительный датчик. Чертёж и спецификация к устройству прилагаются. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
20 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ЗАКЛЮЧЕНИЕ В ходе работы было разработано устройство для измерения скорости угловых перемещений оптическим методом. Для выполнения поставленной задачи был произведен патентный и библиографический поиск. После рассмотрения всех достоинств и недостатков, найденных патентов было разработано устройство, разработана функциональная схема, исходя из которой, спроектирована принципиальная схема, а также был разработан сборочный чертеж корпуса устройства. Точность измерения и погрешность устройства в первую очередь зависят от процессора. Выбранный процессор позволяет работать на частоте 800MHz что позволяет рассчитывать угол смещения на достаточно высокой скорости измерять. Погрешность же зависит от длительности цикла, обработки информации, которая задаётся при программировании микроконтроллера от величины tmax (см. таблица 1). Для обеспечения погрешности по условию проекта в 2% оптимальным значением данной переменной будет 100мс. Спроектированное устройство имеет следующие характеристики: Таблица 2. Характеристики устройства
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ЛИТЕРАТУРА
4. Виглеб Г., Датчики. - М.:Мир,1989.-346с. WEB-РЕСУРСЫ 1. www.analog.com 2.www.hamamatsu.com 3.www.gaw.ru/html.cgi/txt/power/Traco 4. www.tracopower.com 5. www.chipset-v.ru/elfa_goods.php?mode=1&parentid=5332 6. http://engineering-graphics.spb.ru/book.php |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
22 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Приложение А Позиционно-чувствительный датчик S1880 Основные характеристики приведены в таблице А.1. Таблица А.1.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
23 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Приложение Б Микроконтроллер ADuC812 Основные характеристики приведены в таблице Б.1. Таблица Б.1.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
24 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Приложение В Цифро-аналоговый преобразователь AD768 Основные характеристики приведены в таблице А.2. Таблица А.2.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
25 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Приложение Г Конвертер TMS 06112 Основные характеристики приведены в таблице В.1. Таблица В.1.
Конвертеры TEN 5-1221 и TSM 1205S Основные характеристики приведены в таблице В.4. Таблица В.4.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
26 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
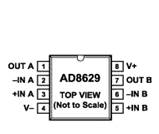
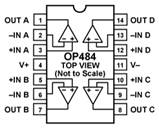
Приложение Д Операционные усилители AD 8629, AD 817, OP 484 Основные характеристики приведены в таблице Г.1. Таблица Г.1.
Стабилизатор напряжения К142ЕН2А Основные характеристики приведены в таблице Г.2. Таблица А.2.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
27 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Приложение Е Патенты 1432332, 1703969, 1714366
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
28 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
29 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
30 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
31 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
32 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
33 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
34 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
35 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
КСУИ.212345.001 ПЗ |
Лист |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
36 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм |
Лист |
№ докум. |
Подп. |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.