 (4.4.1)
(4.4.1)
![]() ,
(4.4.2) где
,
(4.4.2) где
![]() , а Ru(t) и Rv(t) известные ковариационные функции,
, а Ru(t) и Rv(t) известные ковариационные функции,
![]() - символ математического ожидания.
- символ математического ожидания.
Умножая обе части (4.4.2) на u(t-t) и применяя операцию математического ожидания, получим
 ,
(4.4.3)
,
(4.4.3)
или
 , (4.4.4) где R(.) – соответствующие ковариационные функции. Если
входной сигнал и сигнал помехи некоррелированы, то
, (4.4.4) где R(.) – соответствующие ковариационные функции. Если
входной сигнал и сигнал помехи некоррелированы, то
![]()
и получим основное уравнение идентификацииотносительно весовой функции g(t), известное как уравнение Винера-Хопфа
 (4.4.5)
(4.4.5)
Интегральное уравнение (4.4.5) может быть получено из условия минимума по g(t) дисперсии ошибки выхода, т.е.
 .
.
Если входной сигнал является белым шумом, то
![]()
и решение задачи значительно упрощается. Из уравнения (4.4.5) непосредственно получаем
![]() , откуда
, откуда
![]() (4.4.6)
(4.4.6)
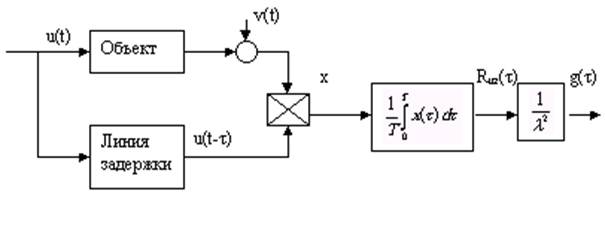
Структурная схема идентификации для этого частного случая приведена на рис.4.4.2.
|
В общем случае произвольного входного сигнала, решение задачи идентификации сводится к численному решению основного уравнения идентификации (4.4.5).
Рассмотрим способ решения этой задачи, основанный на конечно-разностной аппроксимации. Произведём “усечение” весовой функции идентифицируемого объекта, т.е. положим
![]()
рис.4.1.3.
при
t>t1=nT, где n – число интервалов разбиения на [0, t1],
T – величена каждого интервала.
Тогда основное уравнение (4.4.5) примет вид
 (4.4.7)
(4.4.7)
применим ступенчатую аппроксимацию всех функций на интервале [0, t1], т.е. положим
![]()
и
![]() (4.4.8)
(4.4.8)
Уравнение (4.4.7) в этом случае можно записать в точке t=kT следующим образом
![]() (4.4.9)
(4.4.9)
Подставляя в (4.4.9) последовательные значения k=(0,n), получим
![]() :
: ![]()
![]() :
: ![]()
![]()
…………………………………………………………………………… (4.4.10)
![]() :
: ![]()
Вводя в рассмотрение вектор-столбцы
![]() ,
,
![]()
размером “n+1” и квадратную симметричную матрицу
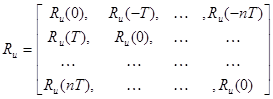
размером “(n+1)x(n+1)”,
линейную систему алгебраических уравнений записываем в виде
![]() , (4.4.11)
, (4.4.11)
откуда при ![]() , т.е. при
, т.е. при ![]() имеем
имеем
![]() (4.4.12)
(4.4.12)
Элементы матриц Ru и Ruz определяются путём вычисления оценок ковариационных функций по формулам
![]() , (4.4.13)
, (4.4.13)
и
![]()
Все вычисления, необходимые для получения решения (4.4.12) легко реализуются в среде MATLAB for Windows.
В заключении отметим, что обратные задачи теории управления, сводящиеся к решению основного уравнения идентификации (4.4.7) относятся к классу некорректных задач, в которых даже малые погрешности задания исходных данных приводят к неустойчивым вычислительным схемам и, как следствие, к значительным искажениям получаемых решений. Основные пути преодоления указанных трудностей состоят в применении методов регуляризации некорректных задач.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.