1 Структурная схема автоматизированного эл.привода, предъявляемые требования к эл.приводу
ЭП- эл/механ система, состоит из эл/привода преобраз-го, передаточного и управляющего устройства, предназначенного для приведения в действие исполнительных органов машины и управление этим двигателем.
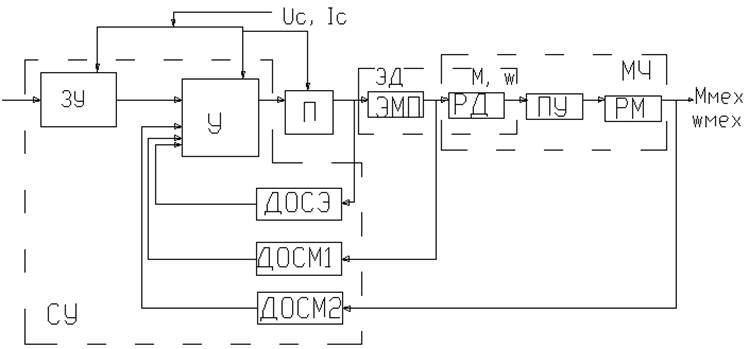
В схеме можно выделить 3 основных элемента: 1. Механич. часть привода (МЧ), которая включает рабочий механизм (РМ); передаточное устройство (ПУ), предназначенное для передачи механ. энергии от эл/двиг к исполнительному органу рабочей машины, и для изменения вида и скорости движения. 2. ЭД – предназначенное для преобразования электр. энергии в механическую или наоборот. ЭД представлен 2 элементами: электрон-механич. преобразователь (ЭМП) и ротор-двигатель (РД). 3. Система управления (СУ), состоит из преобразователя силового (П), управляющего устройства (У), задающего устройства (ЗУ), датчики обратной связи электрические (ДОСЭ), датчики обратной связи механические (ДОСМ1 и ДОСМ2).
У получает командные сигналы от ЗУ, а информация о текущем состоянии эл привода и технлогическ процесса от ДОС. С их помощью эл, механические преобразуются в пропорцион параметры эл сигналом, котор подается в У и сравнивается с иекущим состоянием привода с заданным. При наличии рассогласования вырабатывает управляющий сигнал который воздействует через П на эл привод и устраняет возникшее рассогласование с требуемой точностью и быстродействием.
Требования к ЭП:
1. надёжность (способность выполнять заданные функции в оговоренных эксплуат. условиях);
2. точность (обеспечение необходимой точности). Всегда существует допустимое отклонение от заданных значений за которое нельзя выходить;
3. быстродействие (способность системы достаточно быстро реагировать на различные воздействия);
4. качество динамических процессов )обеспечение определённых закономерностей их протекания во времени);
5. энергетическая эффективность;
6. совместимость эл/привода с СЭС и информационными системами более высокого уровня
2 Классификация эл. приводов
1. по виду движения: вращательное и поступательное, однонаправленное и реверсивное движения, возвратно-поступательного движения. Они имеют непрерывный или дискретный характер.
2. по степени управляемости: нерегулируемый (использ. механ. привод с одной постоянной скоростью); регулируемый (путём воздействия на эл/привод, скорость движения изменяется); следящий – автоматический отрабатывающий перемещение исполнительного механизма с определённой точностью в соответствии с производ. и изменяется задающим сигналом; программно-управляемый – управление в соответствии с заданной программой; адаптивный – автоматиз. обеспечивающий оптимальный режим движения. исполнительного механизма при изменении условий работы
3. по роду механич. передаточного устройства: редукторный эл/привод и безредукторный эл/привод (механизм на валу).
4. по роду эл/преобразующего устройства: система генератор-двигатель (Г-Д) – регулируемый ЭП преобразовательной установки которого является эл/машинный преобразователь; сист. управляемый выпрямительный - двигатель (УВ-Д) –вентильный ЭП постоянного тока, преобразов. установкой которого является регулируемый выпрямитель; система преобразователь частоты - двигатель (ПЧ-Д)-вентильный ЭП переменного тока, преобразов. установкой которого является преобразователь частоты.
5. по способу передачи механ. энергии: групповой ЭП – обеспечивающий движение исполнительных органов нескольких рабочих машин; индивидуальный ЭП; взаимосвязанный ЭП – содержит 2 или несколько электр. или механич. связанныйх между собой эл/двигательных устройств.
6. по роду тока: постоянного или переменного тока.
3. Приведение моментов нагрузки и моментов инерции.
Нагрузка ЭП определяется действием силы тяжести, а также трением движущихся частей. Этот вид нагрузки привода, наз. Потерями на трение, учитывают КПД редуктора (ηб). Приведение момента нагрузки двигателя осуществляется из равенства мех. Мощности нагрузки в реальной и эквивалентной сх.
Приведение моментов нагрузки выполняют 2-мя способами в зависимости от направления движения. Если производится подъем груза, то двигатель совершает полезную работу по подъему груза и покрывает потери мощности на трансформирование в кинематической цепи.
Баланс мощности в этом случае имеет вид:
 (1)
(1)  (2)
(2)
Где Мс- приведенный к валу двигателя момент нагрузки
ω – угловая скорость ротора двигателя
Fпо – сила тяжести груза
Vпо – скорость подъема груза
ρ – радиус приведения кинематической цепи
При опускании груза теряемая им потенциальная энергия передаётся к двигателю. Потери на трение в кинематической цепи покрываются уже за счет этой энергии баланс имеет вид:
 (3)
(3)
 (4)
(4)
Если исполнительный механизм совершает вращательное движение со скоростью ωпо и создает при этом момент нагрузки Мпо, приведенный к валу двигателя. Момент нагрузки Мс определяется:
 (5)
(5) (6)
(6)
Где i – передаточное число кинематической цепи.
(5) справедлива при направлении потока энергии от двигателя к исполнительному органу, (6) наоборот.
Приведение моментов инерции осуществляется исходя из равенства запаса кинетической энергии в реальной и эквивалентной схемы:
 (7)
(7)
 (8)
(8)
Где J – приведенный к валу двигателя момент инерции цепи
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.