1.1. Понятие статической и динамической устойчивости в электроэнергетических системах
Под устойчивостьюсостояния электрической системы понимается ее способность восстанавливать исходный режим (или достаточно близкий к нему) после воздействия какого-либо возмущения («большого» или «малого»). Процесс нарушения устойчивости в электрических системах всегда связан с ограниченной пропускной способностью ее отдельных элементов - линий связи, трансформаторов и.т.п. Естественно, что при неизменных параметрах электрической системы предел передаваемой мощности зависит от уровней напряжений и потерь передаваемой мощности на сопротивлениях элементов. Нарушения устойчивости в электрических системах происходят в результате воздействия на ее работу возмущающих факторов, которые могут быть «большими» и «малыми». Протекание процесса при этом одинаково и сопровождается в любом случае резким снижением напряжения в узлах системы (возникновением «лавины» напряжения), увеличением тока в ее ветвях, изменением скорости вращения электрических машин. Нарушение устойчивости всегда заканчивается появлением асинхронного хода, связанного с неограниченным изменением скоростей вращения синхронных машин, и часто приводит к «развалу» системы - отключению нагрузки, генераторов станций, к делению системы на несинхронно работающие части. «Малые» возмущения опасны для работы электрических систем в тяжелых режимах, когда по ее элементам протекают потоки мощности, близкие к предельным. Тогда как «большие» возмущения могут вызвать нарушение устойчивости в нормальных режимах. В зависимости от причины, которая привела к нарушению устойчивости, выделяются три се вида: - статическая устойчивость - способность системы сохранять (восстанавливать) исходный (или близкий к нему) режим при действии «малых» возмущений. - динамическая устойчивость - способность системы восстанавливать длительно существующий установившийся режим при «больших» возмущениях. - результирующая устойчивость - способность системы возвращаться в длительно существующий установившийся режим после кратковременного нарушения устойчивости.
Статическая устойчивость синхронного генератора
Оценка статической устойчивости синхронного генератора, включенного на шины энергосистемы (рис.1), может быть выполнена при помощи второго закона Ньютона для вращающегося тела
 (1.1.1)
(1.1.1)
где Mв - вращающий момент на валу энергетического двигателя, кг.м; Мс - момент сопротивления (тормозной момент) на валу генератора, кг.м ; ω - угловая частота вращения вала агрегата, с-1;
 -момент инерции, кг.м.с2
-момент инерции, кг.м.с2![]() ;
GD2 - маховые массы вращающихся частей,
присоединенные к валам энергетического двигателя и генератора, кг.м2 ; g = 9,81 м/с2
-ускорение земного притяжения.
;
GD2 - маховые массы вращающихся частей,
присоединенные к валам энергетического двигателя и генератора, кг.м2 ; g = 9,81 м/с2
-ускорение земного притяжения.

1. Схема электропередачи мощности от синхронного генератора в энергосистему и ее схема замещения: Т - турбина; Г - генератор; Т1 - трансформатор подстанции; Л1, Л2 - линии электропередачи; Т2 - трансформатор связи с энергосистемой; ЭС – энергосистема.
Статическая устойчивость синхронного агрегата оценивается при постоянной синхронной частоте вращения, при которой мощности на валу энергетического двигателя и синхронного генератора пропорциональны моментам, а в относительных единицах равны, т. е.
![]()
Статическая
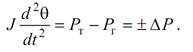
устойчивость оценивается при относительном движении ротора агрегата, т. е. при
перемещении ротора относительно вектора вращающегося электромагнитного поля
статора генератора (рис.2), при изменении угла вылета ротора. Скорость его изменения
соответствует производной  (1.1.2)
(1.1.2)
При относительном движении ротора генератора уравнение движения (1.1.1) можно представиться в следующем виде:
 (1.1.3)
(1.1.3)
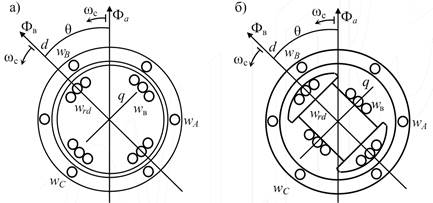
Рис. 2. Принципиальные конструктивные схемы синхронных генераторов: а - неявнополюсный; б - явнополюсный
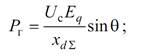
Это уравнение - уравнение динамического равновесия, ибо при равенстве Рт = Рг угол вылета ротора 0 имеет постоянную величину. Если равенства мощностей нет, то имеет место либо ускорение агрегата при Pт > Pг, либо замедление при Рт < Рг, т. е. по знаку разности мощностей можно судить о характере движения вала агрегата. Поэтому целесообразно уравнение (1.1.3) использовать в таком виде
 (1.1.4)
(1.1.4)
где ∆Р - избыточная мощность.Характеристика мощности энергетического двигателя в координатах Р, является прямой линией, так как мощность, развиваемая двигателем, не зависит от угла вылета ротора.
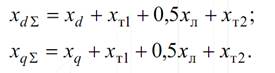
Характеристика мощности синхронного генератора в координатах Р, представляется синусоидальной угловой характеристикой (рис. 3), получаемой из векторной диаграммы:
для неявнополюсной машины (турбогенератора)
 (1.1.5)
(1.1.5)
для явнополюсной машины (гидрогенератора)
 (1.1.6)
(1.1.6)
где ![]() сопротивления
генераторов в продольной и в поперечной осях с учетом сопротивлений схемы
замещения (см. рис. 1)
сопротивления
генераторов в продольной и в поперечной осях с учетом сопротивлений схемы
замещения (см. рис. 1)
Па рис. 3 показаны характеристики турбины и генератора. Характеристики имеют две точки взаимного пересечения 1 и 2. В соответствии с положением теоретической механики в точках
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.