20. Понятие динамической устойчивости системы. Основные допущения при упрощенном анализе.
Динамическая устойчивость — это способность системы приходить после большого возмущения к такому установившемуся режиму работы, при котором значения параметров режима являются допустимыми по условиям эксплуатации системы и электроснабжения потребителей.

Режимы системы:
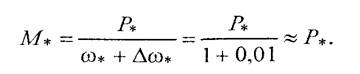
1)Нормальный режим; 2) Режим КЗ; 3) Послеаварийный режим по одноцепной линии.
Главной задачей при решении задачи динамической устойчивости явл. задача нахождения предельного угла отключения КЗ.

Критерий ДУ:
Fуск≤Fтормвозм
Допущения:
1. Вращающийся момент синхронной машины в относительных единицах может быть принят равным мощности
2.Изменения сопротивлений синхронных машин и трансформаторов, обусловленные насыщением стали, в расчетах не учитываются или учитываются приближенно путем уменьшения замещаемого сопротивления.
3.В расчетах динамической устойчивости допускается неучет апериодического тока статора и периодического тока ротора синхронных машин.
4.Предполагается, что на ротор синхронной машины действует электромагнитный момент, обусловленный только токами прямой последовательности, протекающими по статору машины.
5.В сложных системах предварительно упрощают конфигурацию сети и уменьшают число машин (путем замены нескольких генераторов и электростанций одной эквивалентной, объединения или переноса нагрузок).
6.Простейшие расчеты устойчивости могут быть выполнены, исходя из постоянства ЭДС Еq’ Это позволяет синхронную машину представить схемой замещения в виде переходного реактивного сопротивления x'd и ЭДС Eq’.
7.Все изменения режима системы отражаются в изменении ее схемы, в которой вводятся новые значения сопротивлений, ЭДС синхронных машин и их механических мощностей.
21.Динамическая устойчивость станции, работающей на шины бесконечной мощности. Правило площадей и вытекающие из него критерии устойчивости.

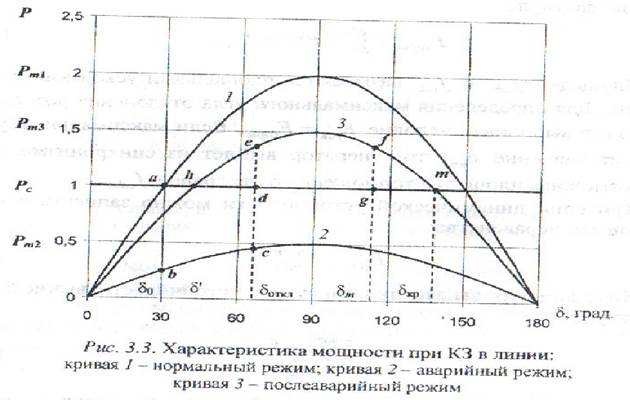
В первый момент времени происходит переход с характеристики мощности 1 на характеристику 2. Из-за инерции ротора угол б не может измениться мгновенно из точки а в точку с. На валу генератора возникает избыточный момент, определяемый разностью мощности турбины и новой мощностью генератора (точка b). Под влиянием избыточного момента ротор генератора начинает ускоряться с увеличением угла б. В результате ускорения рабочая точка начинает движение по характеристике 2 в сторону точки с. В точке с избыточный момент равен нулю и скорость вращения ротора максимальна. После прохождения точки с на ротор воздействует тормозящий момент, который достигает максимума в точке d. Далее тормозящий момент заставляет рабочую точку перемещаться в точку с с уменьшением угла б. Проходя точку с ротор начинает заново ускоряться до точки b за счет избыточного момента. Далее начинается новый цикл относительного движения ротора генератора. Кривая б(t) имеет затухающий характер за счет механических и электрических потерь мощности на валу.
Площадки fabc и fcde называются площадками ускорения и торможения. Для определения максимального угла огклонения ротора бm достаточно выполнить условие Fуск=Fторм. Если максимальный угол превысит значение 6кр, то генератор выйдет из синхронизма. При этом возможная площадка торможения будет равна fcdm.
Критерий динамической устойчивости можно записать в виде следующего неравенства: Fуск=Fтормвозм
Коэффициент запаса динамической устойчивости вычисляется по формуле Кз=(Fтормвозм- Fуск)/ Fуск
22.Анализ динамической устойчивости при отключении короткого замыкания. Предельный угол отключения КЗ. Предельное время отключения.
В момент КЗ
происходит переход с характеристики 1 на хар-ку 2. На валу генератора возникает
избыточный момент, определяемый разностью мощности турбины и новой мощностью генератора (точка b). Под влиянием избыточного момента ротор генератора
начинает ускоряться с увеличением угла б. В результате ускорения рабочая точка
начинает движение по характеристике 2 в сторону точки с. В точке с происходит отключение
КЗ при угле Рабочая точка переходит на кривую 3 послеаварийного
режима. В точке е на ротор воздействует тормозящий момент, равный
отрезку ed. Запаса кинетической
энергии хватает до точки f. Далее тормозящий
момент заставляет рабочую точку перемещаться в точку h с уменьшением угла б.
Проходя точку h, ротор начинает заново ускоряться за счет избыточного момента. Далее
рабочая точка колеблется вокруг точки h по характеристике 3. За счет механических и
электрических потерь мощности на валу угол б установится в точке h.
Согласно критерию динамической устойчивости генератор не выйдет из синхронизма до тех пор, пока точка/не превысит угла 6кр.
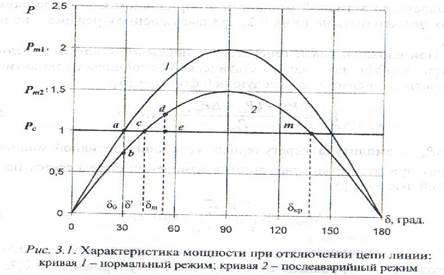
Медленно перемещая угол боткл в сторону увеличения, можно найти предельный угол отключения заданного КЗ ботклпред при равенстве площадок abсd и dem. Решая интегральное уравнение, предельный угол отключения КЗ
При трехфазном КЗ на шинах генератора или полном разрыве (отключении) линии в формуле следует принять Рм2= 0.
23.Методика расчетов динамической устойчивости сложных электрических систем. Методы численного интегрирования.
Если представить часть ЭЭС в виде системы с тремя генераторами, то активная мощность генераторов выражается в виде следующих формул:
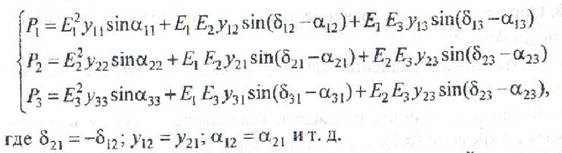
Расчет устойчивости в сложных системах в целом заключается в следующем:
1.Задаться активными и реактивными мощностями каждого генератора в нормальном режиме. Определить распределение потоков мощности в схеме. Проверить баланс активной и реактивной мощностей.
2.Составить схему замещения нормального режима, нагрузки представить постоянными сопротивлениями. Определить ЭДС электростанций и углы между ними при нормальном режиме. Подсчитать собственные и взаимные проводимости для всех станций. Записать характеристики мощности для каждого генератора.
3.Составить схемы замещения обратной и нулевой последовательности и определить результирующие сопротивления обратной и нулевой последовательности, отнесенные к точке КЗ. Подсчитать собственные и взаимные проводимости для всех станций и записать характеристики мощности для каждого генератора в аварийном режиме.
4.Составить схемы замещения послеаварийного режима. Подсчитать собственные и взаимные проводимости для всех станций и записать характеристики мощности для каждого генератора в послеаварийном режиме. Построить угловые характеристики трех режимов и определить предельный угол отключения КЗ.
5.После этого перейти к расчету угловых перемещений Зная углы расхождения роторов машин в момент КЗ, найти значения отдаваемой машинами мощности.
6.Найти избытки мощности в начале первого интервала ΔР1(0)=Р10-Р1 и т.д.
7.Вычислить угловые перемещения роторов машин в течении первого интервала Δδ1(1)=k1 ΔР1(0)/2 и т. д.
8.Определить новые значения углов в конце первого интервала Δδ1(1)=δ1(0)- δ1(1)
9.Повторить п 1-8 для след. интервалов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.