Потребитель рекуперируемой электрической энергии электровоз или электропоезд попутного или встречного движения представлен в виде источника ЭДС (напряжения Uкс) с внутренним сопротивлением rкс и индуктивностью Lкс.
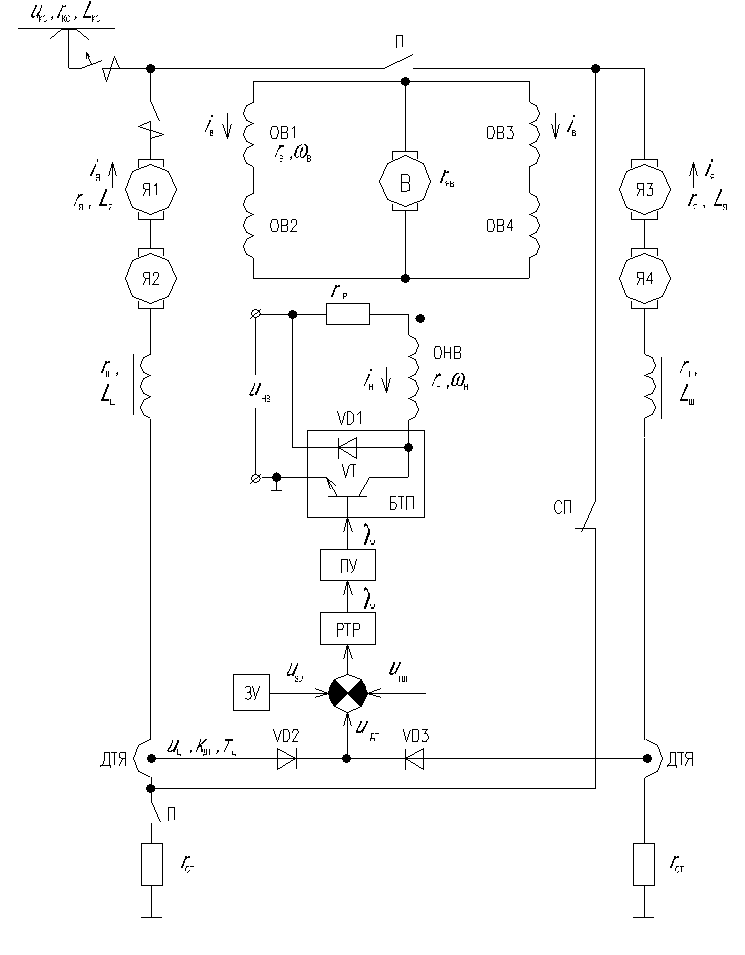 |
Кроме того на схеме обозначены все расчётные параметры системы: сопротивление rя, индуктивность Lя обмоток якорей Я1-Я4, сопротивление rв и число витков w полюсных катушек обмоток возбуждения ОВ тяговых электродвигателей, сопротивление якоря rяв, сопротивление rн, число витков wн обмоток независимого возбуждения ОНВ генератора возбуждения В. Суммарное число витков обмоток противовозбуждения ОПВ генератора возбуждения В wпв =2. Рис.2
Упрощённая схема системы автоматического управления электрическим рекуперативным торможением электровоза ВЛ-11м показана на рис. 2.
Схема силовых цепей этой системы аналогична схеме, приведённой на рис.1. Дополнительно схема оснащена электронным блоком автоматического управления САУРТ-034. Функционирование системы автоматического управления режимами электрического рекуперативного торможения электровоза ВЛ-11м рассмотрено в п.и. "Локомотив" 1997 , №7 [2].
Блок автоматического управления содержит в основном контуре управления регулятор тока рекуперации (РТР), промежуточный усилитель (ПУ) и блок транзисторного прерывателя (БТП). Транзисторный прерыватель непосредственно регулирует ток iн обмотки возбуждения ОНВ генератора возбуждения В.
Обратная связь по току якорей тяговых электродвигателей осуществляется датчиками тока (ДТЯ).
Величина тока рекуперации устанавливается задающим устройством (ЗУ) поворотом тормозной рукоятки контроллера машиниста.
2.2.Функциональная схема системы автоматического управления
Функциональную схему образуют элементы системы автоматического управления, подразделённые по функциональному назначению. Функциональная схема показывает взаимодействие элементов САУ между собой и направление передачи ими сигналов. Она содержит каналы задающих, возмущающих и регулирующих воздействий, а также коэффициенты преобразования сигналов функциональными элементами.
Функциональные схемы системы стабилизации тока рекуперациии электровозов ВЛ-10, систем автоматического управления электрическим рекуперативным торможением электровозов ВЛ-11м показаны соответственно на рис.3а,б.
Объектом
управления (ОУ) служат тяговые электродвигатели, работающие в генераторном
режиме с независимым возбуждением (см. рис.1,2). Выходной переменной системы
автоматического управления является ток iя, возмущающими воздействиями на объект регулирования являются
изменения скорости движения ![]() v
и напряжения контактной сети
v
и напряжения контактной сети ![]() Uкс. Регулирующим
воздействием является ток независимого возбуждения iв тяговых электродвигателей.
Uкс. Регулирующим
воздействием является ток независимого возбуждения iв тяговых электродвигателей.
Исполнительным устройством (ИУ) служит генератор независимого возбуждения В.
Задающее устройство (ЗУ) предназначено для установки машинистом величины тока рекуперации Iя0. В системе рекуперации электровоза ВЛ-10 задающим устройством служит резистор rр в цепи обмотки независимого возбуждения ОНВ. Сопротивление резистора ступенчато изменяется посредством тормозной рукоятки контроллера машиниста. Величиной сопротивления резистора rрустанавливается необходимый ток iн обмотки ОНВ генератора возбуждения тяговых электродвигателей и соответственно ток рекуперации Iя0.
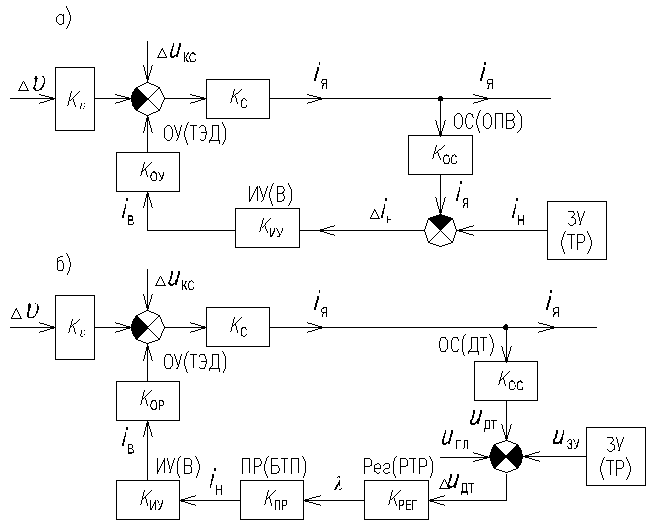 |
Рис.3
Рис 3 а,б
Выпрямленное напряжение обмоток ротора сельсина является сигналом Uзу задающего устройства.
Элементами обратных связей систем автоматического управления электровозов ВЛ-11м служат датчики тока якорей ДТЯ с выходными сигналами Uдт.
В системе стабилизации токов рекуперации электровоза ВЛ-10 применено непосредственное регулирование магнитного потока генератора возбуждения В размагничивающими ампервитками iя wпв обмоток ОПВ, по которым протекают токи якорей тяговых электродвигателей.
Регулятор
(Рег) системы автоматического управления рекуперативным торможением
электровозов ВЛ-11м представляет собой электронный блок-регулятор тока
рекуперации (РТР). Блок РТР осуществляет преобразование сигнала рассогласования
в периодическую последовательность прямоугольных импульсов напряжения с
относительной длительностью ![]() . Посредством этих
импульсов осуществляется управление преобразователем дискретных сигналов (ПР)
блоком транзисторного прерывателя БТП в непрерывный сигнал - ток независимого
возбуждения iнгенератора возбуждения В.
. Посредством этих
импульсов осуществляется управление преобразователем дискретных сигналов (ПР)
блоком транзисторного прерывателя БТП в непрерывный сигнал - ток независимого
возбуждения iнгенератора возбуждения В.
3. Расчет статических характеристик и динамических
параметров элементов систем автоматического управления.
3.1. Расчет статических характеристик и динамических
параметров объекта управления.
Объект управления - тяговые электродвигатели имеют две
электрические индуктивно связанные цепи. Одна из них - цепь якорей. Через нее передаются
на объект регулирования возмущающие воздействия в виде изменений уровня
напряжения контактной сети ![]() и скорости движения
и скорости движения![]() .
.
Другая цепь - цепь возбуждения. Через нее передается
на объект регулирования регулирующее воздействие в виде изменения тока возбуждения![]() .
.
Индуктивная связь цепей якорей и возбуждения проявляется через магнитный поток Ф тяговых электродвигателей. Статические и динамические характеристики объекта регулирования определяются дифференциальным уравнением равновесия токов и напряжений в цепях якорей, а также уравнением намагничивающих сил магнитопровода с учетом влияния вихревых токов, приведенных к току возбуждения тягового электродвигателя:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.