





















































Министерство образования и науки Российской федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Оренбургский государственный университет»
ЕФАНОВ, РОМАНЦОВ, ЗУРНАДЖАН.
Курсовые работы по ТММ
(учебное пособие)
Рекомендовано Ученым советом федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Оренбургский государственный университет» в качестве учебного пособия для студентов, обучающихся по программам высшего профессионального образования по направлению подготовки: 190600 Эксплуатация транспортных технологических машин и комплексов, 151900.62 Конструкторско-технологическое обеспечение машиностроительных производств, 151000.62 Технологические машины и оборудование, 160400.62 Ракетостроение и космонавтика, 151600.62 Прикладная механика.
Оренбург
2013
УДК 621.01(075.8)
ББК 34.4 Я 73
Е 90
Рецензент кандидат технических наук, профессор
,
Е 90 Курсовые работы по ТММ: учебное пособие/ , Романцов, ; Оренбургский гос. ун-т. – Оренбург: ОГУ, 2013. – 70 с.
ISBN
Настоящее пособие включает теоретический материал и примеры практического расчета по разделам курсовой работы дисциплины «Теория механизмов и машин».
Разделы: 1 – Структурный, кинематический и силовой анализ плоских рычажных механизмов, 2 – Синтез кулачковых механизмов. Пособие предназначено для студентов-бакалавров технических специальностей изучающих дисциплину «Теория механизмов и машин» направления подготовки 190600 Эксплуатация транспортных технологических машин и комплексов, 151900.62 Конструкторско-технологическое обеспечение машиностроительных производств, 151000.62 Технологические машины и оборудование, 160400.62 Ракетостроение и космонавтика, 151600.62 Прикладная механика.
![]()
![]() УДК
621.01 (075.8)
УДК
621.01 (075.8)
ББК 34.4 Я 73
© ,
Романцов ,
, 2013
© ОГУ, 2013
Содержание
стр.
|
Введение ………………………………………………………………….. |
|
|
1 Анализ плоских рычажных механизмов. Общие сведения…………………………………………………………………… |
|
|
1.1 Структурный анализ ………………………………………………….. |
|
|
1.2 Кинематический анализ. Общие сведения.………………………… |
|
|
1.2.1 Графоаналитический метод. Общие сведения.………………….. |
|
|
1.2.2 Пример кинематического анализа рычажного механизма ……… |
|
|
1.3 Силовой анализ плоских рычажных механизмов. Общие сведения |
|
|
1.3.1 Определение внешних сил ………………………………………… |
|
|
1.3.2 Определение сил реакций в кинематических парах …………….. |
|
|
1.3.3 Пример силового анализа рычажного механизма ……………….. |
|
|
2 Синтез кулачковых механизмов. Общие сведения ………………….. |
|
|
2.1 Синтез кулачковых механизмов …………………………………….. |
|
|
2.1.1 Выбор схемы ………………………………………………………… |
|
|
2.1.2 Законы движения ведомого звена …………………………………. |
|
|
2.1.3 Построение кинематических диаграмм …………………………… |
|
|
2.1.4 Определение основных размеров кулачковых механизмов ……… |
|
|
2.1.5 Построение профиля кулачка ……………………………………… |
Введение
Теория механизмов и машин – наука об общих методах их анализа и синтеза, теории управления машинами – автоматами и является базой при изучении специальных дисциплин. Курсовая работа является самостоятельной расчетно-графической работой, где студент применяет теоретические знания для решения практических задач, что является одним из важных этапов изучения курса.
Курсовая работа, состоящая из расчётно-пояснительной записки и графических построений, выполняется по СТП 110-01. Все уравнения и формулы пишутся в общем виде, затем в них подставляются числовые данные и приводится конечный результат. Для повторяющихся вычислений результаты представляются в табличной форме. Выполненная курсовая работа рецензируется преподавателем, представляется к защите и оценивается дифференцированной отметкой.
Объем и содержание курсовой работы зависит от специальности студента, количества учебных часов и формы обучения, составляет 1-2 листа формата А1 и определяется решением кафедры.
Содержание листов проекта:
1. Анализ рычажного механизма.
2. Синтез кулачкового механизма.
Для облегчения работы над проектом рекомендуется использовать модули электронной программы APMWinMachine:
1. APMWinCam– расчёт и проектирование кулачковых механизмов;
2. APMWinSlider – расчёт и проектирование рычажных механизмов произвольной структуры.
1 Анализ плоских рычажных механизмов
Курсовую работу выполнить в следующем объеме:
1. Провести структурный анализ механизма, т.е. определить количество и название подвижных звеньев; количество и класс кинематических пар; определить степень подвижности механизма; разбить механизм на структурные группы; составить формулу строения механизма.
2. Построить 12 планов положений механизма, начиная с нулевого (нулевое положение найти построением нескольких пробных положений).
3. Построить план скоростей и план ускорений, для положения указанного в задании. Определить величину и направление скоростей и ускорений центров тяжести звеньев и величину, и направление угловых скоростей и ускорений звеньев.
4. Провести силовой анализ для этого положения, т.е. определить внешние силы, действующие на звенья механизма; разбить механизм на структурные группы; определить силы реакций в кинематических парах; определить уравновешивающий момент; определить уравновешивающий момент методом Жуковского Н.Е.
Общие сведения
Механизмом называется совокупность подвижно соединенных между собой звеньев, совершающих под действием приложенных к ним сил, определенные целесообразные движения.
Звеном называется совокупность деталей скрепленных друг с другом неподвижно.
Деталью машины называют простейшую ее часть, изготовленную без применения сборочных операций (т.е. изготовленную из одного куска материала).
Любой механизм состоит из неподвижного звена (стойка) и подвижных звеньев.
Звенья, к которым приложены силы, приводящие механизм в движение, называют ведущими или входными (вход). Все остальные звенья, преобразующие движение ведущего звена, называются ведомыми или выходными (выход). На схемах звенья нумеруются арабскими цифрами, начиная с входного.
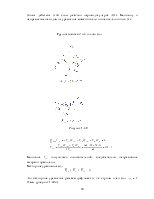
Названия звеньев определяется видом их движения.
Рисунок 1.1а – звено 1 – кривошип, звено, совершающее полный оборот вокруг
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.