А) Сначала строят границу полуплоскости в виде прямой
Б) С помощью контрольной точки выбирают нужную плоскость
Таким образом строят все ограничения.
1) Выбирают общую для всех ограниченную область , которая и будет ОДР задачи.
В данной задаче 4-x угольник ABCD. Каждая точка области является допустимым решением задачи.
Нужно найти точку, в которой функция принимает значение min, для этого нужно построить два произвольных значения целевой функции F , для того, чтобы определить направление её роста. Значения задаются произвольно.
F1=6=3x1+2x2 (2;0)(0;3)
F2=0 ║ F1 через (•) (0;0)
Нашли направление роста F. Двигая в направлении прямой F параллельно самой себе, доходим до крайней точки на ОДР.
В точке C функция достигает своего max : fmax в (•) (x1*;x2*).
Найдём координаты этой точки. Точка C образована пересечением ограничений 1 и 3 .
Решим систему :
 |
Подставим координаты в выражение целевой функции :
Fmax = 3*4+2*4=20
Ответ : Fmax = 20 , x1=4 , x2=4
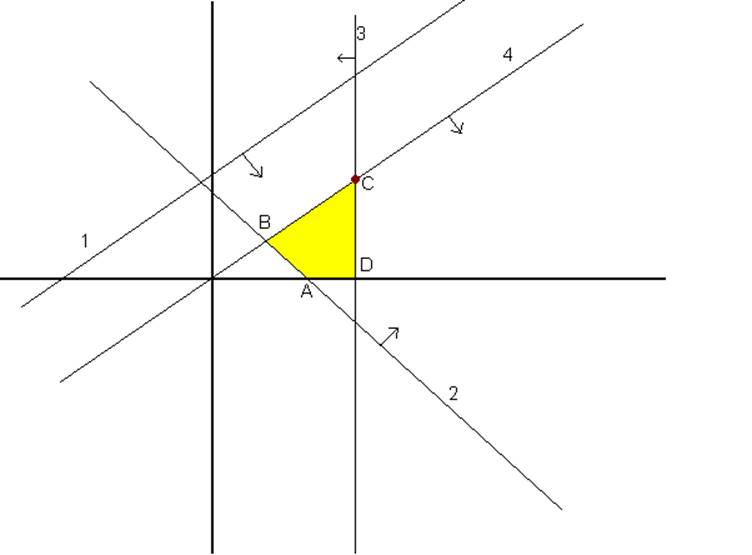
Рисунок 2.1
1) Сравниваем величины а1 и b1, возможны три варианта:
а) а1<b1, тогда => х11=а1, b1 = b1-а1
При этом первая строка выходит из рассмотрения.
б) b1 < a1 => x11 = b1 , a1 = a1-b1
При этом первый столбец выходит из рассмотрения.
c) a1 = b1 => x11 = a1 = b1
При этом и первая строка и первый столбец выходят из рассмотрения и в дальнейшем будем иметь вырожденное решение.
2) Выбирают следующую Северо-Западную клетку и аналогично сравнивают
аi с bj, выбирая из них меньшее и т.д..
3) Последняя клетка заполняется автоматически.
4) Проверяем количество заполненных клеток в таблице, их должно быть m+n-1. Если количество заполненных клеток оказалось меньше, чем m+n-1, то решение вырождено и необходимо в этом случае дополнить недостающее количество, чтобы получилось m+n-1. Для этого в клетку ставят 0, считая эту клетку заполненной.
Внимание: При постановке 0 не должно получаться замкнутых прямоугольников.
3.1 Метод потенциалов для оптимизации решения транспортной задачи
|
90 |
110 |
60 |
200 |
100 |
100 |
|||||||
|
6 |
7 |
7 |
5 |
9 |
0 |
|||||||
|
200 |
90 |
- |
60 |
50 |
- |
- |
||||||
|
m |
4 |
m |
7 |
8 |
0 |
|||||||
|
290 |
- |
110 |
- |
150 |
30 |
- |
||||||
|
7 |
6 |
6 |
8 |
11 |
0 |
|||||||
|
250 |
- |
- |
- |
- |
70 |
180 |
||||||
|
V1= |
6 |
V2= |
2 |
V3= |
7 |
V4= |
5 |
V5= |
6 |
V6= |
-5 |
|
|
F1= |
3710 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.