Таблица 1
Таблица знаков R-функции f(x)=x1x2 и таблица истинности сопровождающей булевой функции
|
x1 |
x2 |
S1 |
S2 |
Знак f(x) |
Значение F(x) |
|
>0 |
>0 |
1 |
1 |
+ |
1 |
|
<0 |
>0 |
0 |
1 |
- |
0 |
|
>0 |
<0 |
1 |
0 |
- |
0 |
|
<0 |
<0 |
0 |
0 |
+ |
1 |
Булева функция F(x), образующая вместе с R-функцией f(x) коммутативную диаграмму (см. рисунок 3), называется сопровождающей булевой функцией.
Итак, R-предикат области – это функция, которая положительна внутри области и отрицательна за её пределами. В случае непрерывной функции на границе она получается равной нулю. Для построения R-предиката сложной области по R-предикатам опорных областей надо построить такую действительную функцию, чтобы её знак определялся знаками аргументов, причём таблица знаков R-функции должна совпадать с таблицей истинности сопровождающей булевой функции.
В.Л.Рвачёвым доказаны теоремы об основных свойствах R-функций. В частности, установлено, что множество R-отображений и множество сопровождающих функций замкнуты (т.е. любая суперпозиция R-функций является R-функцией). Кроме того, установлено, что одна и та же булева функция может оказаться сопровождающей для различных R-отображений. Если считать, что различные R-отображения, имеющие общую сопровождающую булеву функцию, эквивалентны, то всё множество R-отображений можно разбить на ветви эквивалентных функций. Введём также понятие достаточной полноты системы R-функций, состоящее в существовании R-функций в каждой ветви множества сопровождающих функций.
Рассмотрим теперь, как получить R-функцию, если сопровождающая булева функция известна. Основное пространство для построения R-отображений – числовая ось R1. Будем рассматривать действительные функции, определенные на всей числовой оси.
Приведём некоторые их свойства.
1. Для любого разбиения числовой оси функция y = C = const является R-функцией. Сопровождающей функцией для неё будет булев предикат той части числовой оси, которой принадлежит константа С.
2.
Для любого разбиения числовой оси функция y = х является
R-функцией. К числу сопровождающих функций принадлежит
функция k-значной логики ![]() , i=1,
…, k.
, i=1,
…, k.
3.
Пусть разбиение числовой оси симметрично относительно начала координат.
Тогда функция y = -х является R-функцией
с сопровождающей ![]() .
.
4.
Для любого монотонного разбиения числовой оси функции ![]() и
и ![]() будут
R-функциями. В частности, для биекции числовой оси
сопровождающими функциями будут функции двузначной логики; нетрудно проверить,
что булева конъюнкция будет сопровождающей для функции
будут
R-функциями. В частности, для биекции числовой оси
сопровождающими функциями будут функции двузначной логики; нетрудно проверить,
что булева конъюнкция будет сопровождающей для функции ![]() , а дизъюнкция – для
, а дизъюнкция – для ![]() . Доказательство этого факта в
случае разбиения числовой оси на положительную и отрицательную части
основывается на сопоставлении таблиц истинности сопровождающих функций с
таблицами знаков R-функций.
. Доказательство этого факта в
случае разбиения числовой оси на положительную и отрицательную части
основывается на сопоставлении таблиц истинности сопровождающих функций с
таблицами знаков R-функций.
В дальнейшем внимание будет уделяться R-функциям, соответствующим биекции (2). Даже и в этом частном случае можно построить множество систем R-функций, сопровождающими для которых будут основные функции двузначной логики. Некоторые из этих систем приведены в таблице 2.
Таблица 2
Основные системы R-функций
|
Сопровождающая булева функция |
Система Ra |
Система Rm0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
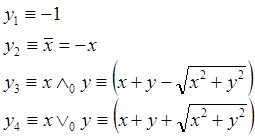
Система Ra, приведенная в таблице 2, содержит параметр a, который может принимать значения из интервала (-1, 1). Этот параметр, вообще говоря, может быть функцией координат. Представляют интерес частные случаи: R0 при a=0 и R1 при a=1. Функции из этих систем приведены ниже.
Для a=0:
Для при a=1:
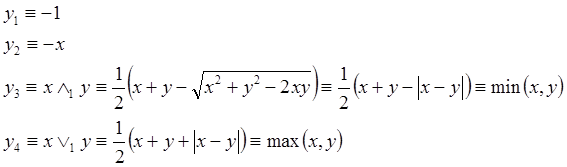
Недостатком этих систем является недифференцируемость в начале координат, а функций системы R1 – и на биссектрисе первого и третьего координатных углов. Система Rm0, приведенная в таблице 2, состоит из функций класса Cm.
Доказательство того, что знаки этих функций однозначно определяются знаками аргументов, и выяснение таблиц знаков функций рекомендуется проделать самостоятельно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.