С приходом на вывод 3 (тактовый вход элемента D10 логической (1) (положительного перепада выводе 6 появится логический (0) (второй D – триггер микросхемы ТМ2 работает в счётном режиме, так как соединены внешней перемычкой выводы 6 и 2)Þ на выводе 13 элемента ЛА3 D8.2 будет (0) Þ на выводе 11 элемента ЛА3 D8.2 будет (1), которая попав на выводы 11 и 10 (вход разрешения счёта V и вход элемента D11, запрёт его (запретит деление).
С приходом на вывод 10 элемента ЛА3 D8.2 логической (1) (на выводе 9 данного элемента уже стоит (1) с вывода 13 элемента D9)на выводе 8 элемента ЛА3 D8.2 появляется (0), который попав на выводы 11 и 10 (вход разрешения счёта V и вход счётчика-делителя D7 запускает его.
Счётчик-делитель D7 изменяет частоту 10 Гц, которая поступает на его вывод 9 (вход вывода 11 элемента D1 и начинает подавать импульсы с вывода 5 (выхода а вывод 4 реверсивного счётчика D3. Реверсивный счётчик D3 начинает выставлять двоичные коды в порядке убывания на выводах 7, 8, 9, 10 ЦАП D4. С приходом на вывод 4 реверсивного счётчика D3 16-ого импульса, на выводе 13 данного счётчика появляется повторяющий импульс, который запускает аналогичный реверсивный счётчик D6. Счётчики D6 и D9 произведут выставление двоичных кодов в порядке убывания на выводах 11, 12, 13, 14 и 15, 16, 17, 18 ЦАП D4 соответственно.
После того как на ЦАП D4 будут выставлены все нули на выводе 13 элемента D9 появится (0), который попадает на вывод 9 элемента ЛА3 D8.2 Þ на выводе 8 элемента ЛА3 D8.2 появляется (1), которая попав на выводы 11 и 10 (вход разрешения счёта V
и вход элемента D7 запрёт его (запретит деление).
На этом схема завершит свою работу.
2.Принцип работы аналогового блока (АБ).
АБ ( устройства управления УУ) состоит из дифференциального усилителя ,интегратора, компаратора, одновибратора и усилителя тока.
Данная система является следящей, т.е. она сама следит за состоянием объекта посредством определённого датчика и автоматически изменяет управляющий сигнал для приведения управляемого объекта в необходимое состояние. Для этого необходимо, чтобы сигнал с датчика при нормальном состоянии объекта совпадал с управляющим сигналом с выхода ЦБ для этого состояния объекта . Эти сигналы поступают на входы дифференциального усилителя, собранного на ОУ ДА4 и элементах R8 R9 R10 R11 . Этот усилитель усиливает разность сигналов и подаёт её на вход компаратора ДА2 . На другой вход компаратора поступает сos с выхода интегратора, собранного на ОУ ДА3 и элементах R1 R2 С3 . При совпадении условий напряжения с выхода ДУ и интегратора компаратор формирует отрицательный перепад напряжения, который в свою очередь запускает одновибратор. Далее одновибратор формирует прямоугольный импульс (меандр) с длительностью необходимой для отпирания оптотиристора . Этот импульс усиливается усилителем тока (если это необходимо) до значения, необходимого для управления оптотиристором. После этого данный сигнал подаётся на анод светодиода соответствующего оптоэлемента .
Следовательно, разность сигналов с выхода датчика и ЦБ управляет средним значением напряжения, подаваемого на нагрузку. Чем больше сигнал с датчика сигнала с ЦБ, тем позже (относительно начала периода) придёт сигнал с выхода компаратора и тем меньше среднее значение напряжения на нагрузке, и наоборот . То есть, при изменении необходимых параметров объекта АБ сам изменяет среднее напряжение на нём, пока параметры не станут соответствовать уровню сигнала с выхода ЦБ.
3. Расчет параметров и компонентов аналогового блока
3.1. Дифференциальный усилитель
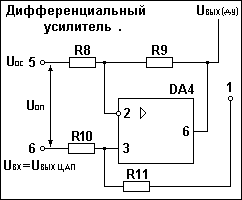 На вход этого
блока подаем два напряжения — одно обратной связи, другое снимаемое с ЦБУ. На
нем получаем усиленный сигнал пришедший с ЦБУ, но с учетом обратной связи, т.е.
производится коррекция в зависимости от U поданного в
нагрузку; таким образом, если есть отклонение в нагрузке, то это приведет к
изменению сигнала обратной связи.
На вход этого
блока подаем два напряжения — одно обратной связи, другое снимаемое с ЦБУ. На
нем получаем усиленный сигнал пришедший с ЦБУ, но с учетом обратной связи, т.е.
производится коррекция в зависимости от U поданного в
нагрузку; таким образом, если есть отклонение в нагрузке, то это приведет к
изменению сигнала обратной связи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.