








данным таблицы 4 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
3.Снятие характеристик (регулирование скорости вращения) двигателя М1
введением добавочных сопротивлений (реостатное регулирование)
Таблица 5
|
w1 |
с-1 |
120 |
88,3 |
68 |
41 |
120 |
Примечания |
|
I1 |
А |
4 |
5 |
5,5 |
6 |
4 |
U=24B; Iв1=мaкс; R1=2,5 Ом; |
|
М1 |
Н´м |
0,653 |
0,8 |
0,843 |
0,816 |
0,653 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *4=0,65Н´м
По данным таблицы 5 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
Таблица 6
|
w1 |
с-1 |
161 |
143 |
114 |
84 |
161 |
Примечания |
|
I1 |
А |
5 |
6 |
7 |
8 |
5 |
U=24B; Iв1=мaкс; R1=4,5 Ом; |
|
М1 |
Н´м |
0,817 |
0,96 |
1,073 |
1,088 |
0,817 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *5=0,82 Н´м
По данным таблицы 6 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
4.Снятие характеристик (регулирование скорости вращения) двигателя М1
ослаблением магнитного потока
Таблица 7
|
w1 |
с-1 |
260 |
249 |
236 |
217 |
204 |
Примечания |
|
I1 |
А |
8 |
9 |
11 |
14 |
16 |
U=24B; Iв1=1 А; R1=0 Ом; |
|
М1 |
Н´м |
1,216 |
1,368 |
1,672 |
2,128 |
2,432 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,152 *8=1,216 Н´м
По данным таблицы 7 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
Таблица 8
|
w1 |
с-1 |
308 |
301 |
275 |
247 |
308 |
Примечания |
|
I1 |
А |
12 |
13 |
15 |
19 |
12 |
U=24В Iв1=0,5 А; R1=0 Ом; |
|
М1 |
Н´м |
1,332 |
1,443 |
1,665 |
2,109 |
1,332 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,111 *12=1,332 Н´м
По данным таблицы 8 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
5.Режим рекуперативного торможения
Таблица 9
|
w1 |
с-1 |
305 |
309 |
311 |
316 |
Примечания |
|
I1 |
А |
-1 |
-2 |
-3 |
-5 |
U=24В; Iв1= мaкс; R1=0Ом; |
|
М1 |
Н´м |
-0,163 |
-0,32 |
-0,460 |
-0,68 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *(-1)=-0,163 Н´м
По данным таблицы 9 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
Таблица 10
|
w1 |
с-1 |
323 |
358 |
376 |
400 |
Примечания |
|
I1 |
А |
-1 |
-2 |
-3 |
-4 |
U=24B; Iв1= мaкс; R1=3 Ом; |
|
М1 |
Н´м |
-0,163 |
-0,32 |
-0,460 |
-0,544 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *(-1)=-0,163 Н´м
По данным таблицы 10 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
6. Режим торможения противовключением
Таблица 11
|
Двигательный Режим |
Стоп |
Противо-включение |
Примечания |
||||||||
|
w1 |
c-1 |
233 |
195 |
100 |
50 |
0 |
-18,7 |
-64,6 |
-123 |
U=МАКС; Iв1=МАКС=const R1=1,5 Ом; M1=C1×I1 |
|
|
I1 |
A |
2 |
4 |
10 |
11 |
13 |
14 |
15 |
17 |
||
|
M1 |
Нм |
0,326 |
0,64 |
1,534 |
1,496 |
2,1242 |
2,287 |
2,4 |
2,61 |
||
Пример расчета: М1 = С1*I1=0,1634 *2=0,327 Н´м
По данным таблицы 11 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
Таблица 12
|
Двигательный Режим |
Стоп |
Противо-включение |
Примечания |
||||||||
|
w1 |
c-1 |
172 |
38,7 |
20 |
0 |
-3,5 |
-88 |
-119 |
-194 |
U=МАКС; Iв1=МАКС=const R1=4,5 Ом; M1=C1×I1 |
|
|
I1 |
A |
2 |
5 |
6 |
6,5 |
7 |
8 |
8,7 |
10 |
||
|
M1 |
Нм |
0,3268 |
0,8 |
0,9204 |
1,0621 |
1,1438 |
1,28 |
1,3345 |
1,36 |
||
Пример расчета: М1 = С1*I1=0,1634 *2=0,327 Н´м
По данным таблицы 12 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
7. Режим динамического торможения
Таблица 13
|
w1 |
с-1 |
70,2 |
92,6 |
145 |
192 |
227 |
Примечания |
|
I1 |
А |
-3 |
-4 |
-7 |
-9 |
-10 |
U=24B; Iв1= мaкс; R1=4,5 Ом; |
|
М1 |
Н´м |
-0,490 |
-0,64 |
-1,074 |
-1,224 |
-1,14 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *(-3)= -0,49 Н´м
По данным таблицы 13 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
Таблица 14
|
w1 |
с-1 |
34 |
73 |
94 |
123 |
Примечания |
|
I1 |
А |
-1 |
-2 |
-2,5 |
-3 |
U=24B; Iв1= мaкс; R1=4,5 Ом; |
|
М1 |
Н´м |
-0,163 |
-0,32 |
-0,383 |
-0,408 |
M1=С1I1 |
Пример расчета: М1 = С1*I1=0,1634 *(-1)= -0,163 Н´м
По данным таблицы 14 строим характеристики ω=f(M1), ω=f(I1) (Рис.3,4)
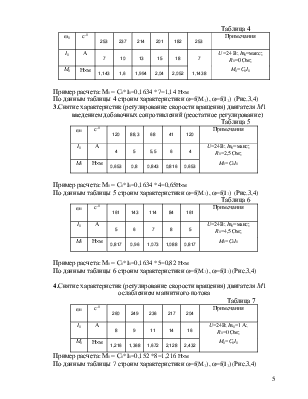
Рис.2 Характеристика С1=f(Iв1)
Рис. 3 Электромеханические характеристики ω=f(I1)
Рис.4 Механические характеристики ω=f(M1)
Вывод:
Естественные механические и электромеханические характеристики –это зависимости ω(М) и ω(I) соответственно, при номинальной схеме включения двигателя, номинальных параметрах питающей сети и отсутствия добавочных сопротивлений в цепи якоря двигателя ( ест. ω=f(M1), ω=f(I1) (Рис.3,4)). Все остальные характеристики будут искусственными. С помощью искусственных характеристик регулируется скорость в электроприводе. Механическая характеристика ДПТ с НВ описывается уравнением:
w=U/(k×Ф) - M×R/(kФ)2=U/С - M×R/С2=w0 - Dw,
где w0 – скорость идеального холостого хода w0=U/С, С- коэффициент связи двигателя .
При регулировании скорости изменением напряжения подводимого к якорю электромеханические и механические характеристики имеют вид параллельных прямых (1(U1=26 B), 2(U1=18 B), 3(U1=11 B) ω=f(M1), ω=f(I1) (Рис.3,4)). С уменьшением напряжения U пропорционально уменьшается скорость идеального холостого хода, так как из уравнения механической характеристики при I=const, R=const, Ф=const: w=U/c – const. Регулирование осуществляется вниз от естественной характеристики, так как увеличение напряжения выше номинального (естественная характеристика) приведет к дополнительному нагреву ДПТ, что не допустимо.
При регулировании скорости изменением добавочного сопротивления в цепи якоря электромеханические и механические характеристики имеют вид прямых выходящих из одной точки, но имеющие разные наклоны (4-5(R1=4,5 Ом), 6(R1=2,5 Ом) ω=f(M1), ω=f(I1) (Рис.3,4)). Так как w0=U/С не зависит от R, поэтому все характеристики пересекаются на оси скорости в одной точке w=w0, I=0, M=0. Наклон характеристик, определяемый перепадом скорости:
Dw=I×R/С=М×R/С2,
пропорционален полному сопротивлению якоря, поэтому при увеличении R наклон характеристик увеличивается, т.е. они становятся более мягкими. Диапазон регулирования небольшой, обычно не превосходит 2–3. При увеличении R снижается жесткость и возникают значительные потери мощности при больших диапазонах регулирования. Регулирование скорости осуществляется ступенчато, вниз от естественной характеристики.
Регулирование скорости изменением магнитного потока (7(Iв1=1 А), 8(Iв1=0,5 А) ω=f(M1), ω=f(I1) (Рис.3,4)) осуществляется только в сторону уменьшения тока возбуждения, увеличение потока возбуждения происходит при увеличении тока возбуждения выше номинального, что вызовет дополнительный нагрев ДПТ, это не допустимо; магнитная система близка к насыщению, поэтому увеличение тока возбуждения не даст заметного практического результата. При его уменьшении увеличивается скорость идеального холостого хода
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.