з) RAL – команда сдвигов: циклический сдвиг содержимого аккумулятора
влево, включая фла
 г переноса CF.
г переноса CF.
Содержимое аккумулятора до выполнения команды А = 5А и флаг переноса CF=1
а к к у м у л я т о р
После выполнения сдвига:
![]()
![]()
0 1 0 1 1 0 1 1 1 = B7
![]()
|
Акк=B7, СF=0
![]()
и) STA 8060 – команда передачи данных: запись содержимого аккумулятора в ячейку памяти с адресом 8060
Акк–> М[8060]
B7–>M[8060]
к) HLT — команда управления микропроцессором: останов
3. Результат Z=B716=101101112;
результат находится в ячейке памяти с адресом 8060 и в аккумуляторе микропроцессора
Akk=Z=B7=M[8060]
4. Содержимое регистра флагов МП определяется по результату выполнения последней команды фрагмента программы, изменяющей флаги.
Так как команда RAL воздействует только на флаг CF, то остальные 4 флага ZF, ACF. PF и SF определяем по предыдущей команде ADD А.
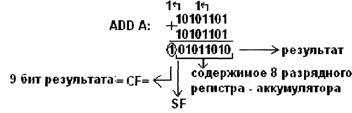
Проанализируем результат сложения по команде ADD A:
флаг знака результата SF=0, т.к. восьмой бит результата равен 0;
флаг нуля ZF=0, так как результат отличено от 0;
флаг дополнительного переноса ACF=1, т.к. есть перенос из 4 бита в 5 (из младшей тетрады, результата в старшую);
флаг четности числа единиц в восьми разрядном результате PF=l, так как в результате четное количестве единиц (4).
Флаг основного переноса CF=0 после выполнения команды RAL.
Все флаги хранятся в определенных разрядах регистра флагов (рис 3)
|
|
 16
16
Рисунок 3 - Содержимое RgF (Регистра флагов)
5. При рассмотрении команд программы (пункт 2) были определены узлы операционного устройства МП, которые участвовали в выполнении фрагмента:
а) Регистровая пара HL;
б) Регистр – аккумулятор;
в) Регистр В; г) АЛУ;
д) Регистр флагов;
е) 2 буферных регистра на входах АЛУ (БФА и БФР2), в которых хранятся операнды, участвующие в операции АЛУ.
![]()
![]()
 |
|||
Методические указания по выполнению задания №4
Программируемый контроллер прерываний (ПКП) - БИС КР 580 ВН59 – предназначен для организации режима приоритетных прерываний от 8-ми УВВ с возможностью увеличения количества прерываний до 64 при каскадном включении контроллеров.
Режим прерывания – это такой режим работы МП, при которой он прерывает выполнение основной программы по запросу ПФУ и переходит на выполнение прерывающей подпрограммы, после окончания которой он возвращается к выполнению основной программы.
В режиме приоритетных прерываний каждому УВВ назначается свой приоритет, в соответствии с которым обслуживается это УВВ.
Функции ПКП в МПС:
Вектор прерывания – это первый адрес прерывающей подпрограммы.
ПКП является программируемым, поэтому перед работой в него необходимо загрузить управляющие слова инициализации – УСИ1 и УСИ2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.