Для получения нового технического решения (НТР), продолжим линию вытеснения человека из ТС. При использовании датчика данной конструкции, оператор должен с помощью некоего внешнего устройства измерить изменение резонансной частоты и на основе измерения вычислить перемещение по заранее известной формуле.
НТР 1: введем в схему датчика дополнительный блок, который будет измерять изменение резонансной частоты и выводить величину перемещения в удобном для человека виде. Если датчик используется как часть системы автоматического управления, можно выводить величину перемещения в качестве цифрового сигнала.
2.2 Закон энергетической и информационной проводимости ТС
Формулировка закона: необходимым условием принципиальной жизнеспособности ТС является сквозной проход энергии и информации по всем частям ТС.
На рисунке 3 представлена линия сквозного прохода энергии (информация не рассматривается отдельно, т.к. перенос информации требует переноса энергии).

Рисунок 3 – Линия сквозного прохода энергии в ТС.
Начнем анализ системы с коротких плеч пластин 1 и 2. Под действием перемещения источника измерения, расстояние между короткими плечами уменьшается, что приводит к увеличению расстояния между длинными плечами 5 и 6. Очевидно, что в данном случае имеет место перенос механической энергии перемещения (информацией в данном случае является величина перемещения). Перемещение длинных плеч вызывается перемещение механически связанных с ними обкладок конденсатора 9 и 10., т.е., опять перенос механической энергии. Перемещение обкладок вызывает ослабление электрического взаимодействия между обкладками, что приводит к уменьшению емкости. Конденсатор электрически связан с катушкой индуктивности, поэтому изменение его емкости вызывает изменение резонансной частоты, которая является выходным сигналом датчика. Эта линия сквозного прохода энергии охватывает все ключевые элементы ТС.
В ходе изучения описания работы датчика, остался неясным вопрос крепления пластин 1 и 2. Этот вопрос имеет принципиальное значение, т.к. чем больше разница длин плеч, тем большее усилие надо приложить к коротким плечам, чтобы привести систему в движения. То есть, для улучшения передачи механической энергии в этой части схемы, необходимо минимизировать сопротивление силы трения. Если датчик используется для измерения перемещения объекта, который не может обеспечить достаточного усилия, измерительное устройство начинает оказывать влияние на измеряемый объект, что недопустимо.
НТР 2: исходя их условия желательности использования одного поля для передачи энергии и информации в ТС, можно выбросить из системы всю электрическую часть, оставив только механику. Для того, чтобы сделать возможным отображения результата измерения, укрепим на одном длинном плече шкалу, а на другом – стрелку, указывающую отклонение. Если сделать разницу плеч достаточно большой, такой датчик позволит измерять довольно небольшие перемещения. Недостатком такой системы является, конечно, природа выходного сигнала, которая в необработанном виде может быть воспринята только человеком. В системах управления или в электронных системах такой датчик неприменим.
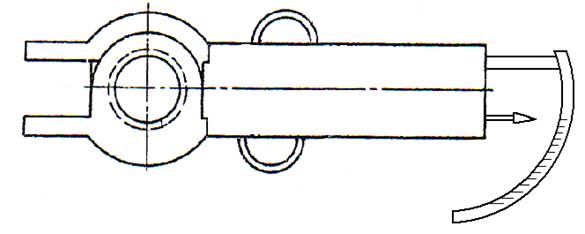
Рисунок 4 – Конструкция стрелочного датчика линейных перемещений из НТР 2.
2.3 Закон согласования-рассогласования ТС
Формулировка закона: составляющие техническую систему части должны быть согласованы или, наоборот, рассогласованы между собой.
Согласование конденсатора и индуктивности в резонансную схему является необходимым условием функционирования датчика (т.к. выходной сигнал – резонансная частота). Также согласованы механические части датчика – диэлектрические пластины 1 и 2. Они укреплены на общей оси и плотно пригнаны друг к другу, чтобы исключить люфт.
Высокая точность датчика достигается за счет рассогласования между собой длины плеч датчика, которые работают по принципу рычага, т.е. представляют собой простейшую механическую передачу. Также части датчика рассогласованы по быстродействию – электрическая часть гораздо более быстродействующая, чем механическая.
2.4 Закон увеличения степени идеальности ТС
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.