Вектор остатков равен
![]() (5.6.27)
(5.6.27)
Остаточная сумма квадратов

(5.6.28)
Из выражения (5.6.26) определяем вектор ошибки оценивания
![]() (5.6.29)
(5.6.29)
Остаточная дисперсия ошибки оценки равна

(5.6.30)
Ковариационная матрица оценки (ошибки оценки) равна
![]()
Таким образом, НЛНО в общем случае определяется выражением (5.6.24) или (5.6.26).
Рассмотрим некоторые важные частные случаи ошибок измерения в общей схеме обобщённых оценок.
1.
![]() - равноточные некоррелированные наблюдения. Положим
- равноточные некоррелированные наблюдения. Положим
![]() , тогда уравнение наблюдения
можно записать
, тогда уравнение наблюдения
можно записать
![]() , где
, где ![]()
НЛНО имеет вид
![]()
или
![]() (5.6.31)
(5.6.31)
Вектор остатков равен:
![]()
Остаточная сумма квадратов:
![]()
Вектор ошибки:
![]() (5.6.32)
(5.6.32)
Ковариация ошибки:
![]() (5.6.33)
(5.6.33)
Остаточная дисперсия оценки:
![]() (5.6.34)
(5.6.34)
2. ![]() ,
,
- случай равноточных коррелированных наблюдений.
Положим
N=KKT
И
![]() , тогда можно записать
, тогда можно записать
![]() , где
, где ![]()
Оценка (НЛНО) имеет вид
![]() или
или ![]() (5.6.35)
(5.6.35)
Ковариация ошибки:
![]() (5.6.36)
(5.6.36)
Остаточная дисперсия оценки:
![]() (5.6.37)
(5.6.37)
3. ![]() -
неравноточные некоррелированные наблюдения.
-
неравноточные некоррелированные наблюдения.
Пусть
или
![]() , где
, где  ,
,
![]() ,
,
![]()
Оценка записывается в общем виде (5.6.24)
![]()
или более подробно
![]()
![]() , откуда получим окончательное
выражение для оценки
, откуда получим окончательное
выражение для оценки
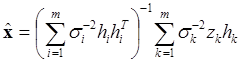 (5.6.38)
(5.6.38)
Критерий оценивания при этом имеет вид
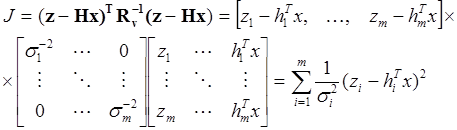 (5.6.39)
(5.6.39)
Таким образом, оценка (5.6.38) минимизирует взвешенную сумму квадратов
отклонений наблюдений ![]() от их математических ожиданий
от их математических ожиданий ![]() .
.
Ковариация ошибки:
![]()
Остаточная дисперсия оценки:
![]()
Полезно и поучительно провести сравнительный анализ оценок МНК с байесовскими оценками и оценкой максимального правдоподобия для линейной схемы наблюдений и нормального распределения вектора ошибок с ковариационной матрицей Rv.
Оптимальная байесовская оценка оказалась инвариантной к виду функции потерь линейной функцией результатов наблюдений. При
![]()
и независимых с оцениваемым вектором ошибках наблюдения, согласно (5.4.8) можно записать выражение для этой оценки
![]() (5.6.40)
(5.6.40)
Ковариационная матрица вектора ошибок равна
![]()
Сравнивая выражения (5.5.6) и (5.6.25) приходим к выводу, что для линейной схемы наблюдения и нормально-распределённого вектора ошибки МП-оценка и МНК-оценка совпадают между собой и равны
![]() , и
, и
![]() (5.6.41)
(5.6.41)
Из записанных выражений
следует, что если в (5.6.40) и (5.6.41) принять ![]() ,
что означает неограниченное возрастание дисперсий всех компонент хiвектора х, и как следствие отсутствие
априорной информации о величинах хi , то автоматически
получаем оптимальные МП и МНК оценки, в которых оцениваемый вектор в
постановочной части обоих методов оценивания трактовался как неслучайный. Это
оправдывает оправдывает возможность интерпретации неслучайного вектора как
случайного с некоррелированными компонентами и бесконечно большими дисперсиями.
,
что означает неограниченное возрастание дисперсий всех компонент хiвектора х, и как следствие отсутствие
априорной информации о величинах хi , то автоматически
получаем оптимальные МП и МНК оценки, в которых оцениваемый вектор в
постановочной части обоих методов оценивания трактовался как неслучайный. Это
оправдывает оправдывает возможность интерпретации неслучайного вектора как
случайного с некоррелированными компонентами и бесконечно большими дисперсиями.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.