На рис. 5-11 представлены механические
характеристики, которые при свободном обмене энергией между двигателем и сетью
могут располагатьсяв любом из четырех квадрантов координатной системы М-![]() .
При этом обеспечиваются все возможные режимы (двигательный и тормозные)
электрической машины. Характеристики 1 и 5, построенные для случая
.
При этом обеспечиваются все возможные режимы (двигательный и тормозные)
электрической машины. Характеристики 1 и 5, построенные для случая ![]()
![]()
![]() являются естественными механическими характеристиками
для двух противоположных направлений вращения двигателя.
являются естественными механическими характеристиками
для двух противоположных направлений вращения двигателя.
 Характеристики 2 и 3 соответствуют
увеличенному на
Характеристики 2 и 3 соответствуют
увеличенному на ![]() и
и
![]() сопротивлениюякорной цепи, 4 - характеристика динамического торможения.
сопротивлениюякорной цепи, 4 - характеристика динамического торможения.
Характеристики рис. 5-11 построены в функции электромагнитного момента, момент же на валу двигателя меньше на величину момента потерь (в основном за счет трения между щетками и коллектором).
У
двигателей малой мощности момент потерь двигателя относительно велик и может
быть определен по паспортным данным двигателя. Поскольку в двигательном
режиме момент на валу двигателя меньше электромагнитного момента на величину
момента потерь, а в тормозном – больше на такую же величину, то механическая
характеристика двигателя при ![]() терпит
излом (рис.5-12).
терпит
излом (рис.5-12).
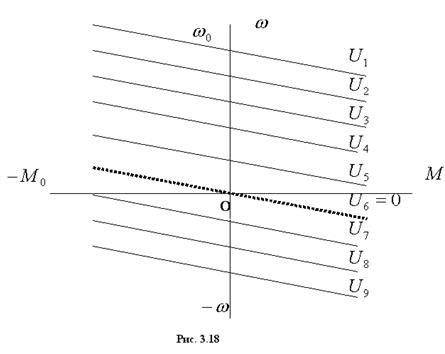
На рис.5-13 показаны механические характеристики при изменении напряжения в цепи якоря.
 Следует
отметить, что обозначенные на рис.5-11 режимы работы электрической машины
характерны не только для машин постоянного тока, но и для любых других типов
машин.
Следует
отметить, что обозначенные на рис.5-11 режимы работы электрической машины
характерны не только для машин постоянного тока, но и для любых других типов
машин.
Двигательный
режим характеризуется потреблением электрической энергии и преобразованием её
в механическую энергию за вычетом потерь: ![]()
|
Во
втором (четвертом) квадранте при скорости машины превышающей значение скорости
идеального холостого хода (![]() при
при
![]() )
ЭДС, наводимая в обмотке ротора при его вращении, становится больше напряжения
источника питания. В соответствии с (5-6) ток двигателя изменит направление и
электрическая энергия от электрической машины начнет поступать в источник
питания (сеть). Возникает режим рекуперативного торможения с отдачей энергии
в сеть или источник питания. Такой режим возможен при поступлении энергии
от источника механической энергии (двигатель любого типа, опускающийся груз на
грузоподъемном барабане и т.п.). Механическая энергия, поступающая со стороны
вала двигателя преобразуется в электрическую за вычетом потерь:
)
ЭДС, наводимая в обмотке ротора при его вращении, становится больше напряжения
источника питания. В соответствии с (5-6) ток двигателя изменит направление и
электрическая энергия от электрической машины начнет поступать в источник
питания (сеть). Возникает режим рекуперативного торможения с отдачей энергии
в сеть или источник питания. Такой режим возможен при поступлении энергии
от источника механической энергии (двигатель любого типа, опускающийся груз на
грузоподъемном барабане и т.п.). Механическая энергия, поступающая со стороны
вала двигателя преобразуется в электрическую за вычетом потерь:
![]() .
.
Точка пересечения
механической характеристики с осью скоростей ![]() является
граничной и называется скоростью идеального холостого хода. Она не относится
ни к одному из режимов, т.к. мощность машины в этой точке равно нулю
является
граничной и называется скоростью идеального холостого хода. Она не относится
ни к одному из режимов, т.к. мощность машины в этой точке равно нулю
![]()
Режим рекуперативного торможения энергетически весьма целесообразен, т.к. позволяет полезно использовать механическую энергию, потребляемую с вала машины.
При переходе механической характеристики из первого квадранта в четвертый (из третьего во второй) она пересекает ось моментов, при этом изменяется знак скорости при сохранении знака момента. Изменение направления вращения ротора приводит к изменению знака ЭДС, которая теперь складывается с напряжением источника питания и их сумма определяет ток машины.
![]() .
.
Такой режим получил название режима противовключения, т.к. направление вращения ротора двигателя не совпадает с направлением вращения на холостом ходу. В режиме противовключения энергия потребляется как из источника питания, так и с вала двигателя, а выделяется на сопротивлении якорной цепи.
Третий тормозной режим – режим динамического торможения получается при отключении обмотки ротора от сети и замыкании ее на сопротивление.
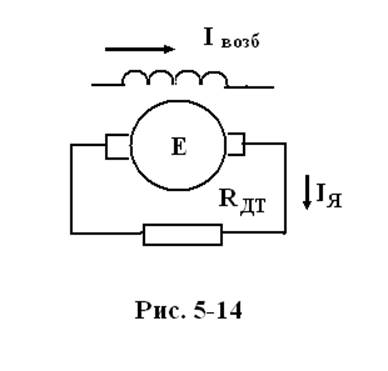 Ротор
двигателя не получает питания, а машина работает генератором. Нагрузкой
генератора является сопротивление динамического торможения
Ротор
двигателя не получает питания, а машина работает генератором. Нагрузкой
генератора является сопротивление динамического торможения ![]() .
Если обмотка ротора замкнута накоротко, т.е.
.
Если обмотка ротора замкнута накоротко, т.е. ![]() ,
нагрузкой генератора служит собственное сопротивление обмотки ротора.
,
нагрузкой генератора служит собственное сопротивление обмотки ротора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.