





этом к электроприводу требование регулирования положения не предъявляется.
Однако электропривод должен обеспечивать регулирование скорости и обладать благоприятными динамическими свойствами, облегчающими регулирование положения оператором.
Автоматическое регулирование положения требует дискретного или непрерывного контроля текущих значений регулируемой координаты. Электроприводы, предназначенные для регулирования положения рабочего органа машины, называются позиционными.
В зависимости от конкретных требований возможны четыре варианта автоматического регулирования положения:
· точное позиционирование электропривода в заданных точках пути по дискретным сигналам путевых датчиков (точный останов электропривода);
непрерывное автоматическое регулирование положения по отклонению в целях осуществления дозированных перемещений;
непрерывное регулирование положения по отклонению по заданной программе (программно управляемый позиционный электропривод);
непрерывное автоматическое регулирование положения по отклонению при произвольно изменяющемся сигнале задания (следящий электропривод).
Точный останов электропривода
Задача точного останова сводится автоматическому отключению двигателя и наложению механического тормоза в такой точке пути, из которой привод за время торможения, двигаясь по инерции, перемещается в заданную точку за время торможения с требуемой тонностью. Процесс останова начинается с поступления в схему управления сигнала с путевого командоаппарата на отключение двигателя и наложение механического тормоза. Если принять, что отключение двигателя и наложение механического тормоза происходят одновременно и усилие тормоза возрастает до установленного значения скачком, то весь процесс точного останова можно разделить на два этапа.
Первый этап связан с
собственным временем срабатывания аппаратуры в схеме управления
электроприводом ![]() .
Вследствие возникающего запаздывания в течение времени
.
Вследствие возникающего запаздывания в течение времени ![]() двигатель
не отключается от сети, и электропривод продолжает движение со скоростью
двигатель
не отключается от сети, и электропривод продолжает движение со скоростью ![]() ,
с которой он подошел к датчику точного останова, и проходит путь
,
с которой он подошел к датчику точного останова, и проходит путь
![]() .
.
По истечении времени срабатывания
аппаратуры двигатель отключается от сети, и накладывается механический тормоз.
Наступает второй этап процесса останова, во время которого запасенная во всех
движущихся массах механизма кинетическая энергия расходуется на совершение
работы по преодолению сил статического сопротивления движению на проходимом при
этом пути ![]() :
:
где ![]() -
момент механического тормоза.
-
момент механического тормоза.
Полный путь за время останова
 .
(1)
.
(1)
На первом этапе скорость ![]() ,
на втором она изменяется в зависимости от пути по закону
,
на втором она изменяется в зависимости от пути по закону
![]() , где
, где ![]() -
ускорение электропривода на втором этапе.
-
ускорение электропривода на втором этапе.
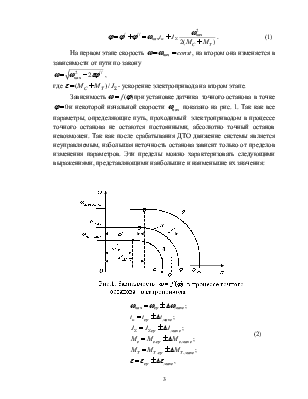
Зависимость ![]() при
установке датчика точного останова в точке
при
установке датчика точного останова в точке ![]() и
некоторой начальной скорости
и
некоторой начальной скорости ![]() показано
на рис. 1. Так как все параметры, определяющие путь, проходимый
электроприводом в процессе точного останова не остаются постоянными, абсолютно
точный останов невозможен. Так как после срабатывания ДТО движение системы
является неуправляемым, набольшая неточность останова зависит только от
пределов изменения параметров. Эти пределы можно характеризовать следующими
выражениями, представляющими наибольшие и наименьшие их значения:
показано
на рис. 1. Так как все параметры, определяющие путь, проходимый
электроприводом в процессе точного останова не остаются постоянными, абсолютно
точный останов невозможен. Так как после срабатывания ДТО движение системы
является неуправляемым, набольшая неточность останова зависит только от
пределов изменения параметров. Эти пределы можно характеризовать следующими
выражениями, представляющими наибольшие и наименьшие их значения:
 |
 (2)
(2)
где ![]() -
средние значения параметров;
-
средние значения параметров; ![]() -
отклонения от средних значений параметров.
-
отклонения от средних значений параметров.
Пределы перемещения можно представить аналогично:
![]() (3)
(3)
где ![]() -
средний путь при точном останове;
-
средний путь при точном останове; ![]() -
максимальная ошибка позиционирования или максимальная неточность останова.
-
максимальная ошибка позиционирования или максимальная неточность останова.
ДТО должен устанавливаться
на расстоянии ![]() (рис.1),
на этом рисунке кривые 2 и 3 показывают зависимости
(рис.1),
на этом рисунке кривые 2 и 3 показывают зависимости ![]() при
сочетании параметров, соответствующих наибольшей ошибке позиционирования.
при
сочетании параметров, соответствующих наибольшей ошибке позиционирования.
С помощью (2) по (1) можно определить наибольший путь при точном останове
 (4)
(4)
и его наименьшее значение
![]()
 ,
(5)
,
(5)
Здесь обозначено ![]() и
и
![]() .
.
Эти выражения позволяют получить среднее значение пути, проходимого электроприводом в процессе точного останова:
 (6)
(6)
Максимальная неточность останова
 (7)
(7)
Анализ (6) и(7) свидетельствует о том, что максимальная неточность останова тем больше, чем больше средний путь при останове и чем больше относительные отклонения всех факторов от соответствующих средних значений.
Так как относительные отклонения значительно меньше единицы, то можно пренебречь их произведениями и квадратами, при этом (7) можно представить в виде:
 (8)
(8)
Из (8) видно, что наибольшее влияние на ошибку позиционирования влияет величина средней начальной скорости и ее отклонение от среднего значения. Следовательно, основным фактором, вызывающим неточность останова
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.