Используя (6) и (7), получим

или ![]() для
для
![]()
![]() для
для
![]()
Шаговые двигатели с активным ротором. Шаговые двигатели этого типа возбуждаются постоянными магнитами и имеют явно выраженные полюса на роторе. Для любой конструкции необходимо, чтобы число пар полюсов статора соответствовало числу зубцов ротора (обычно они равны).
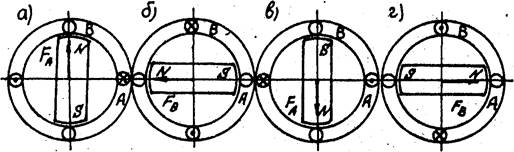
Рис.6 Устойчивые положения ротора при включении: а) - фазы А; б) - фазы В; в) - фазы А с противоположной полярностью; г) - фазы В с противоположной полярностью
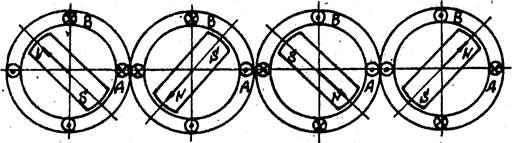
Рис. 7 Устойчивые положения при включении двух фаз с различными направлениями токов
Принцип действия
шагового двигателя с активным ротором поясняют рис. 6 и 7, на которых показаны
устойчивые состояния ротора при симметричном двуполярном управлении. Число
устойчивых состояний ![]() ротора
многополюсной машины рассчитывают по формуле
ротора
многополюсной машины рассчитывают по формуле
![]() , где
, где ![]() -число
пар полюсов;
-число
пар полюсов; ![]() число
фаз,
число
фаз, ![]() -
коэффициент (
-
коэффициент (![]() при
симметричном однополярном управлении;
при
симметричном однополярном управлении; ![]() при
двуполярном симметричном управлении или однополярном несимметричном управлении;
при
двуполярном симметричном управлении или однополярном несимметричном управлении;
![]() при
двуполярном несимметричном управлении).
при
двуполярном несимметричном управлении).
Уменьшение шага двигателей с активным ротором возможно только за счет увеличения числа фаз статора и тактов коммутации. При обесточенных обмотках ротор занимает определенное положение, совпадающее с направлением максимального потока в соответствии с осью симметрии статорных полюсов. Наличие такого свойства - одно из преимуществ шаговых двигателей с активным ротором. Если фиксация ротора в обесточенном состоянии нежелательна, двигатели выполняют со скосом пазов статора на одно полюсное деление, что также способствует уменьшению колебаний момента двигателя.
Обычно шаговые двигатели этого типа имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения, что упрощает коммутатор. Коммутацию четырехфазной обмотки обычно делают четырехтактной парной: 1,2 – 2,3 – 3,4 – 4,1 – 1,2 ….здесь цифрами обозначены номера фаз.
Эквивалентная
схема двигателя всегда сводится к эквивалентной схеме двухфазной машины с
двумя обмотками ![]() и
и
![]() по
которым протекают токи, сдвинутые по фазе на
по
которым протекают токи, сдвинутые по фазе на
|
|
угол 900 (рис.8), удовлетворяющим условию ![]() ,
где
,
где ![]() -
механический угол;
-
механический угол;
![]() -
число пар полюсов.
-
число пар полюсов.
Для полных потокосцеплений обмоток справедливы соотношения
 Рис.8 Параметры
Рис.8 Параметры ![]() (собственная
индуктивность) и
(собственная
индуктивность) и ![]() (взаимная
индуктивность ротора и полюса статора) характеризуют среднюю величину индукции
и ее изменении в зависимости от положения зубцов ротора относительно выступов
статора. Параметр
(взаимная
индуктивность ротора и полюса статора) характеризуют среднюю величину индукции
и ее изменении в зависимости от положения зубцов ротора относительно выступов
статора. Параметр ![]() обусловлен
магнитным сопротивлением. Параметр
обусловлен
магнитным сопротивлением. Параметр ![]() обусловлен
магнитным сопротивлением. Магнитная энергия определяется по формуле
обусловлен
магнитным сопротивлением. Магнитная энергия определяется по формуле
 ,
,
откуда находим
![]() .
.
Для ![]() и
и
![]() момент
равен
момент
равен ![]() для
для
![]()
![]() момент
равен
момент
равен ![]()
При одновременном питании двух обмоток

Следует отметить, что основной составляющей момента двигателя является величина, характеризуемая потоком постоянных магнитов ротора. Переменное магнитное сопротивление, обусловленное формой наконечников полюса статора, большого значения не имеет.
Индукторные шаговые двигатели по конструкции сходны с реактивными. Основная их особенность состоит в том, что магнитный поток в зазоре содержит постоянную и переменную составляющие. Постоянная составляющая может создаваться либо постоянной составляющей тока обмоток возбуждения (двигатели с самовозбуждением), либо специальной обмоткой (независимое возбуждение), либо постоянными магнитами.
Двигатели с самовозбуждением наиболее просты по конструкции, однако у них отсутствует фиксация ротора при обесточенных обмотках.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
