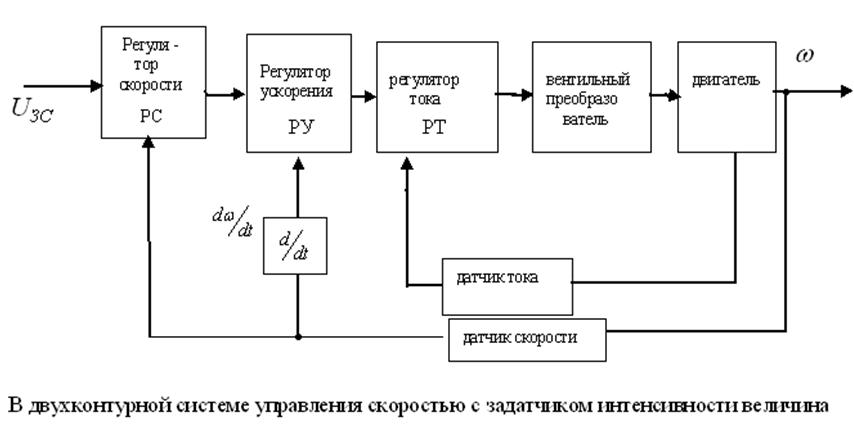
Выходной сигнал регулятора скорости ограничен величиной сигнала здания на ток якоря двигателя, который не должен превышать максимально допустимое значение. Поэтому при относительно быстрых изменениях UЗС, когда вступает в действие токоограничение, ускорение двигателя может превысить допустимое ускорение механизма. Для устранения этого явления целесообразно сигнал UЗТ подавать через за датчик интенсивности. Интенсивность изменения сигнала соответствует заданному ускорению привода вплоть до максимально возможного. При набросе нагрузки ток ограничивается величиной, соответствующей выходному напряжению регулятора скорости. Однако при этом накапливается ошибка регулирования скорости, которая при сбросе статической нагрузки приводит к разгону привода под "отсечку". Поэтому для механизмов, работающих с нагрузками близкими к предельным, вместо задатчиков интенсивности можно применять отдельный регулятор ускорения.
В
двухконтурной системе управления скоростью с задатчиком интенсивности величина
запаса напряжения ![]() (или
(или ![]() ) должна выбираться с учетом быстродействия контура
скорости. Так при отсутствии в контуре скорости дополнительных инерционностей
(фильтров в прямом и обратном каналах) и настройке на модульный оптимум величина
) должна выбираться с учетом быстродействия контура
скорости. Так при отсутствии в контуре скорости дополнительных инерционностей
(фильтров в прямом и обратном каналах) и настройке на модульный оптимум величина
![]() уменьшается в два раза по сравнению с величиной при
ступенчатом сигнале задания на ток. Это позволяет уменьшить запас по напряжению
преобразователя. В присутствии фильтров в цепи обратной связи по скорости или в
канале задания тока якоря (например, если контур тока настроен по симметричному
оптимуму) их действие может быть учтено при выборе величины КФ. При
настройке контура скорости по симметричному оптимуму требуется повышенный запас
по напряжению преобразователя.
уменьшается в два раза по сравнению с величиной при
ступенчатом сигнале задания на ток. Это позволяет уменьшить запас по напряжению
преобразователя. В присутствии фильтров в цепи обратной связи по скорости или в
канале задания тока якоря (например, если контур тока настроен по симметричному
оптимуму) их действие может быть учтено при выборе величины КФ. При
настройке контура скорости по симметричному оптимуму требуется повышенный запас
по напряжению преобразователя.
Двухзонное регулирование скорости в приводах постоянного тока с двигателями независимого возбуждения.
Рассмотренные системы подчиненного управления могут быть применены и в том случае, когда скорость двигателя регулируется как за счет изменения напряжения на якорной цепи двигателя, так и за счет ослабления магнитного потока. На рис. приведена функциональная схема электропривода, в которой кроме контуров регулирования тока якоря и скорости двигателя созданы контур регулирования ЭДС и контур регулирования тока возбуждения, который является внутренним по отношению к контуру регулирования ЭДС. Контуры регулирования скорости и тока якоря организованы в строгом соответствии с теми принципами, которые были рассмотрены ранее. Между выходом регулятора скорости и входом регулятора тока включено нелинейное звено, ограничивающее максимальное значение сигнала задания на вход контура регулирования тока. Это позволяет ограничить максимальную величину тока на желаемом уровне. Уставка токоограничения может регулироваться в процессе работы системы.
Контур
тока возбуждения включает в себя возбудитель, регулятор тока возбуждения, датчик
тока. На входы регулятора тока возбуждения подаются сигналы, определяющие заданное
![]() и
действительное
и
действительное ![]() значения
тока возбуждения.
значения
тока возбуждения.
В
контур ЭДС входят замкнутый контур тока возбуждения, регулятор ЭДС, датчик ЭДС
двигателя с коэффициентом передачи ![]() .
Выходное напряжение датчика ЭДС
.
Выходное напряжение датчика ЭДС
![]() пропорционально
ЭДС двигателя..
пропорционально
ЭДС двигателя..
Для того чтобы знак сигнала на выходе датчика ЭДС не изменялся при изменении направления вращения двигателя, на выход датчика ЭДС включен блок выделения модуля БМ.
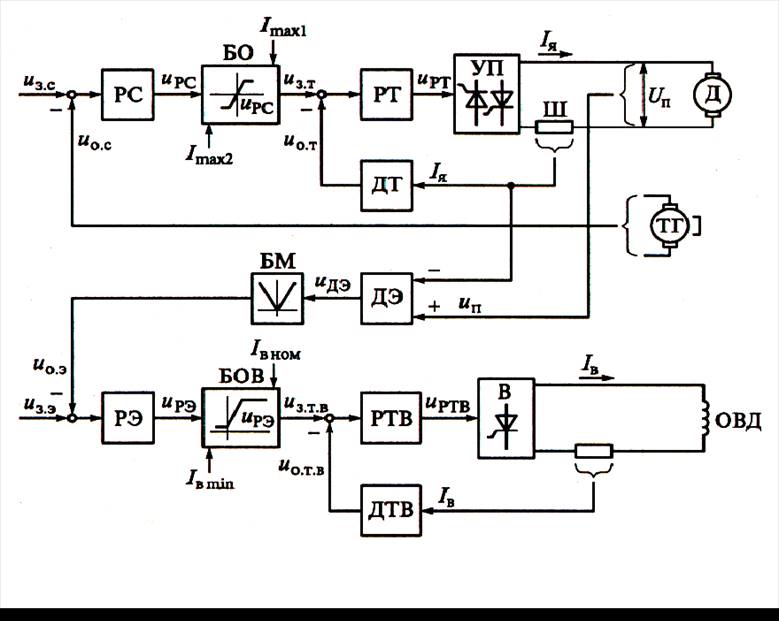
Сигал задания на входе регулятора ЭДС определяется в соответствии с величиной ЭДС, соответствующей номинальной скорости двигателя. При скоростях двигателя меньше номинальной (двигатель работает в первой зоне регулирования скорости) сигнал на входе РЭ превышает сигнал обратной связи. Выходной сигнал регулятора ЭДВ, за счет интегральной составляющей его передаточной функции, становится максимальным и ограничивается блоком БОВ на уровне, обеспечивающем работу двигателя при номинальном потоке возбуждения.
При
номинальной скорости двигателя сигналы ![]() и
и
![]() становятся
равными, регулятор ЭДС выходит из режима насыщения, что приводит к замыканию
контура регулирования ЭДС. Система теперь работает в режиме стабилизации
номинальной ЭДС двигателя., увеличение скорости при изменении сигнала задания происходит
за счет ослабления магнитного потока двигателя.
становятся
равными, регулятор ЭДС выходит из режима насыщения, что приводит к замыканию
контура регулирования ЭДС. Система теперь работает в режиме стабилизации
номинальной ЭДС двигателя., увеличение скорости при изменении сигнала задания происходит
за счет ослабления магнитного потока двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.