Получение
высоких скоростей движения в ЛШД не вызывает трудностей, поскольку увеличение
зубцового деления и частоты не лимитируется технологическими факторами. Технологические
ограничения накладываются на минимальное значение ![]() . Для уменьшения шага
полюсы ЛШД целесообразно выполнять зубчатыми, как у ШД вращательного движения.
Такая конструкция ЛШД позволяет получить шаг
. Для уменьшения шага
полюсы ЛШД целесообразно выполнять зубчатыми, как у ШД вращательного движения.
Такая конструкция ЛШД позволяет получить шаг ![]() , который
ограничивается в сторону уменьшения только допустимыми зазорами между
индуктором и вторичным элементом. Для оптимального использования магнитной
системы ЛШД по объему необходимо выполнить условие
, который
ограничивается в сторону уменьшения только допустимыми зазорами между
индуктором и вторичным элементом. Для оптимального использования магнитной
системы ЛШД по объему необходимо выполнить условие ![]() , где
, где ![]() - воздушный зазор между
индуктором и вторичным элементом.
- воздушный зазор между
индуктором и вторичным элементом.
При невысоких скоростях перемещения подвижного элемента магитопровод ЛШД можно изготавливать из нешихтованной стали и рассматривать сам двигатель как элемент конструкции механизма.
Использование дискретного привода позволяет не только упростить кинематику механизмов, обеспечивающих простое однокоординатное движение, но и в большей степени облегчить получение сложного движения по двум и более координатам.
В настоящее время в качестве линейных используются шаговые двигатели, двигатели постоянного тока, асинхронные, электромагнитные, пьезоэлектрические, пьезомагнитные и другие типы двигателей.
Линейный шаговый двигатель показан на рис. 3.46,а (на рисунке видно взаимное расположение зубцов). Система питания четырех обмоток позволяет перемещать одну часть двигателя относительно другой.
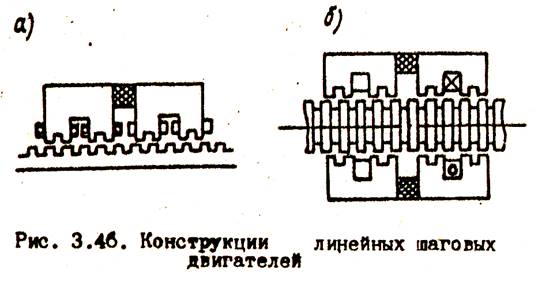 В такой
конструкции не компенсированы нормальные нагрузки, которые могут быть
очень велики. Трубчатая конструкция двигателя (рис.3.46,б) оказывается
более предпочтительной.
В такой
конструкции не компенсированы нормальные нагрузки, которые могут быть
очень велики. Трубчатая конструкция двигателя (рис.3.46,б) оказывается
более предпочтительной.
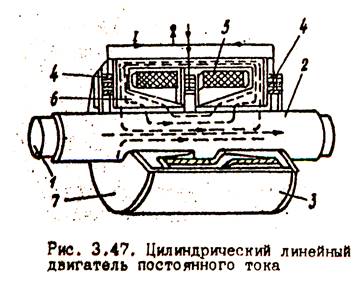 Линейный
двигатель постоянного тока со своеобразным линейным коллектором (очищенной
от изоляции полоской на поверхности якоря) представлен на рис. 3.47. Якорь 1
неподвижен, а подвижной элемент 3 представляет собой устройство с рабочим
магнитным полем. Подвижной элемент центрируется относительно якоря специальными
колесами. Сердечник якоря выполнен из магнитомягкой стали. Обмотка 2 -
медная с лаковым покрытием, ток в обмотку подается через щетки 4,
закрепленные на подвижном элементе, который получает питание через контактный
рельс. Обмотки возбуждения 5 создают рабочее магнитное поле, проходящее через
сердечник якоря, воздушный зазор и полюса 6. Ток, текущий по обмотке 2,
взаимодействует с потоком возбуждения и создает аксиальную силу, направленную
в сторону движения подвижного элемента.
Линейный
двигатель постоянного тока со своеобразным линейным коллектором (очищенной
от изоляции полоской на поверхности якоря) представлен на рис. 3.47. Якорь 1
неподвижен, а подвижной элемент 3 представляет собой устройство с рабочим
магнитным полем. Подвижной элемент центрируется относительно якоря специальными
колесами. Сердечник якоря выполнен из магнитомягкой стали. Обмотка 2 -
медная с лаковым покрытием, ток в обмотку подается через щетки 4,
закрепленные на подвижном элементе, который получает питание через контактный
рельс. Обмотки возбуждения 5 создают рабочее магнитное поле, проходящее через
сердечник якоря, воздушный зазор и полюса 6. Ток, текущий по обмотке 2,
взаимодействует с потоком возбуждения и создает аксиальную силу, направленную
в сторону движения подвижного элемента.
Объединение
двух линейных двигателей в одной конструкции позволяет получить устройство,
осуществляющее перемещение по двум координатам. Двухкоординатный двигатель,
разработанный в Московском энергетическом институте, показан на рис. 3.48. Он
представляет собой двухмодульную конс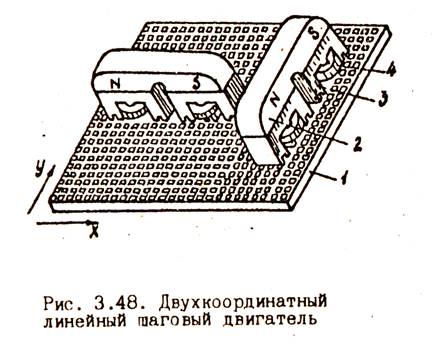 трукцию.
Каждый модуль, расположенный
над пассивной магнито
- мягкой плитой 1, содержит
постоянный магнит
возбуждения 2 и два
Ш-образных шихтованных
магнитопровода 3.
Полюсные наконечники
магнитопроводов 3 снабжены
зубцами с шагом, равным
шагу зубцов на плите- индукторе. Сдвиг зубцов
крайних полюсов
магнитопровода 3
относительно зубцов среднего полюса равен
трукцию.
Каждый модуль, расположенный
над пассивной магнито
- мягкой плитой 1, содержит
постоянный магнит
возбуждения 2 и два
Ш-образных шихтованных
магнитопровода 3.
Полюсные наконечники
магнитопроводов 3 снабжены
зубцами с шагом, равным
шагу зубцов на плите- индукторе. Сдвиг зубцов
крайних полюсов
магнитопровода 3
относительно зубцов среднего полюса равен ![]() .
.
На среднем
полюсе магнитопровода находится катушка 4, состоящая из двух встречно
включенных частей. Модули объединяются в одном корпусе, представляющем собой
якорь, перемещающийся на аэростатических опорах в направлениях X и Y. Для
повышения устойчивости движения, сглаживания пульсаций силы и увеличения общего
тягового усилия увеличивают количество элементарных модулей, при этом сдвиг
зубцов соседних полюсов, принадлежащих разным модулям, составляет ![]() .
.
 Последовательно подаваемые импульсы управления вызывают смещение якоря до установки
зубцов возбужденных электромагнитов против зубцов на плите-индукторе. Пазы на
якоре и плите залиты немагнитным компаундом для снижения трения при перемещении
и для создания между якорем и плитой воздушной подушки. Применение
электромагнитного дробления шага позволяет получить малый единичный шаг (2-10
мкм), высокую повторяемость положений (0,5-3,0), большие скорости перемещений
(0,8-1,0 м/с).
Последовательно подаваемые импульсы управления вызывают смещение якоря до установки
зубцов возбужденных электромагнитов против зубцов на плите-индукторе. Пазы на
якоре и плите залиты немагнитным компаундом для снижения трения при перемещении
и для создания между якорем и плитой воздушной подушки. Применение
электромагнитного дробления шага позволяет получить малый единичный шаг (2-10
мкм), высокую повторяемость положений (0,5-3,0), большие скорости перемещений
(0,8-1,0 м/с).
Двухкоординатные шаговые двигатели находят применение в станках для сверления печатных плат, в манипуляторах для автоматизации сборочных операций, в графопостороителях.
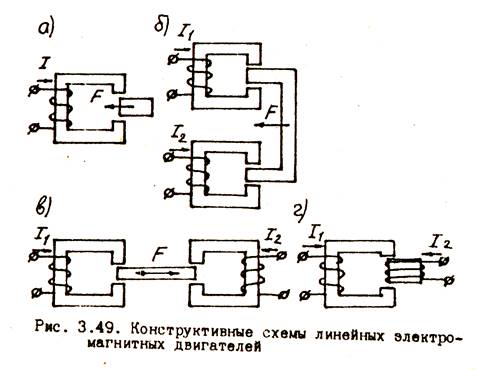
Линейные электромагнитные двигатели. Принцип действия простейших электромагнитных двигателей может быть основан на изменении либо собственных, либо взаимных индуктивностей обмоток, либо тех и других. Это видно из выражения для энергии ненасыщенной магнитной системы, имеющей две обмотки:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.