В математике задачу преобразования произведения функций в суммувыполняют методом "разложения на элементарные дроби".При этом нужно соблюдать одинаковую размерность слагаемых.
Для смещенных ДПФ выражение (6.5.) приобретает иной вид:
![]() (7.5.)
(7.5.)
Примечание 1. Задача. Найти ДПФ двух апериодических звеньев, соединенных как типовые ИС и нетиповые ИС?
Решение. Передаточные функции звеньев будут:![]()
Их ДПФ с экстраполятором нулевого порядка, (воспользовавшись специальными таблицами преобразований K(s) форм функций в K(z, 0) формы функции), найдем в таком виде:
![]()
Перемножая полученные ДПФ по формуле (1.5.), получим:
![]() (см. рис.
3.5.). (1.5.) 1
(см. рис.
3.5.). (1.5.) 1
Найдем теперь соединение тех же звеньев в "нетиповую ИС".
 (**)
(**)
Преобразуя выражение (*.*) по формуле (6.5), получим:
 (6.5)1
(6.5)1
Сопоставляя выражения (1.5)1 и (6.5)1, нетрудно заметить различия в содержании полиномов числителей этих ДПФ (хотя знаменатели равны). Следовательно будет иной динамика и устойчивостть "типовых" и "нетиповых" ИС. Ещё раз напомним ,что реально используются как те, так и другие структуры ДСАУ.
Преобразование нетиповой структуры при наличии экстраполятора первого порядке ещё сложнее. Сначала его запишем, аналогично (6.5.), в общем виде
![]() ,
(8.5)
,
(8.5)
где
Затем
примем:![]() ,
, ![]()
Следовательно выражение (8.5.) разрешится в такой форме:
 .
(9.5.)
.
(9.5.)
Здесь, в первую очередь, необходимо вычислить неопределенные коэффициенты А B, C и D в нижеследующих равенствах:
![]() .
.![]() , а
затем найти
, а
затем найти ![]() . Далее преобразования
завершаются в (9.5.) подстановкой туда найденных
. Далее преобразования
завершаются в (9.5.) подстановкой туда найденных ![]() форм
с помощью специальных таблиц или "вычетов".
форм
с помощью специальных таблиц или "вычетов".
Аналогично можно воспользоваться и w-преобразованием.
3.5 Передаточная функция замкнутых систем
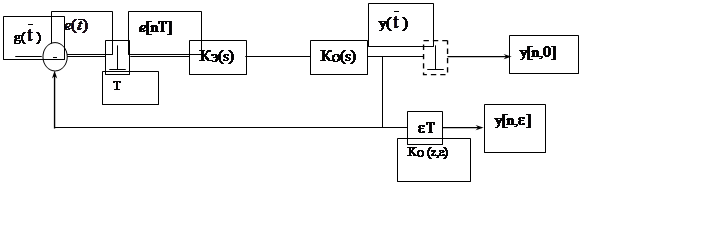
Передаточные функции замкнутых систем разнообразны. Это зависит от структуры физической модели ДСАУ. Ниже приводится одна из структур.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
Рис. 6.5.
Здесь (рис. 6.5.) использованы один реальный и два
идеальных ИЭ2). Обозначим ![]() . Это будет
несмещенная ДПФ объекта ("приведенной" разомкнутой системы) и смещенная
ДПФ объекта
. Это будет
несмещенная ДПФ объекта ("приведенной" разомкнутой системы) и смещенная
ДПФ объекта ![]() .
.
Для замкнутой САУ получим ДПФ в таких видах:
 несмещенная
(10.5.)
несмещенная
(10.5.)
![]() . смещенная (11.5.)
. смещенная (11.5.)
Устойчивость ДСАУ определяется по знаменателю ДПФ: 1+ K(z,0). Это выражение от смещения не зависит. Тогда возникает резонный вопрос. Зачем нужны модели более сложных смещенных РФ и ДПФ? Поясним необходимость смещенных и несмещенных РФ и ДПФ на одном примере.
В
реальных ДСАУ, при определенной структуре и интервале квантования, может
возникнуть режим "скрытых колебаний", который нельзя обнаружить
выборкой несмещенной РФ ![]() (см.
рис.7.5.). Притом, что огибающая кривая
(см.
рис.7.5.). Притом, что огибающая кривая ![]() является
неустойчивой (колебательной, расходящейся).
является
неустойчивой (колебательной, расходящейся).
Если же огибающую строить по смещенным и несмещенным значениям РФ, то режим “скрытых колебании”, обнаруживается. Попутно заметим, что аналитическую оценку устойчивости таких систем определить очень сложно. В последующих лекциях это будет сделано.
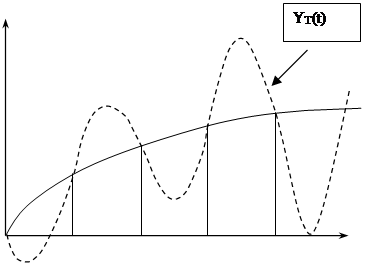 |
Рис.7.5.
2)Примечание 2. Отметим ещё, что на выходе линии
задержки "εТ" помещен фиктивный квантователь для смещенного сигнала
y[n, εT], чтобы получить ДПФ ![]() , как и для РФ - y[n,
0]. Суть вопроса состоит в том, что схема, изображенная на рис.6. 5, является
расчетной моделью, а не реальной структурой.
Она предназначена для аналитических, а не имитационных исследований ДСАУ.
Поэтому для расчетной модели (схемы) оказывается неважным, что обе РФ выхода
y[n, 0] и
, как и для РФ - y[n,
0]. Суть вопроса состоит в том, что схема, изображенная на рис.6. 5, является
расчетной моделью, а не реальной структурой.
Она предназначена для аналитических, а не имитационных исследований ДСАУ.
Поэтому для расчетной модели (схемы) оказывается неважным, что обе РФ выхода
y[n, 0] и
y[n, εT] фиктивны. Хотя y[n, 0]присутствует в модели как реальная функция, представленная разностью двух реальных дискретных сигналов: y[n, 0] =g[n, 0] - e [n, 0].
Смещенную же РФ y[n, εT], как реальную (или вычисляемую) величину, не найти в схеме рис.6. 5.,без её структурной перестройки.
Скорректировано 03.03.09.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.