Трактор в агрегате с навесной машиной будет развивать максимальные тягово-сцепные показатели при полностью вывешенной машине, т. е. когда реакция под ее опорным колесом Yо=0. Однако чрезмерное снижение реакции Yоприводит к неустойчивому по глубине движению рабочего органа навесного орудия в почве, периодическому его выглублению. Поэтому созданы различные по конструкции системы регулирования нагрузки на опорное колесо. Все системы имеют одинаковую силовую часть (гидроцилиндр), а различаются по регулируемому параметру. К такому параметру относится сила или перемещение, либо и то, и другое. Полости А и Б (рис. 5.4) гидроцилиндра соединены золотником, положение которого определяется регулируемым параметром, определяющим Yо.
Известно три способа регулирования, обеспечивающие копирование навесной машиной рельефа почвы: высотный, силовой, позиционный. На современных тракторах, как правило, используют комбинацию этих способов в разном сочетании, в зависимости от технологического допуска на регулируемый параметр, например, на глубину хода рабочего органа машины. Однако повышение точности системы регулирования снижает производительность агрегата.
При работе с навесным плугом целесообразно применять позиционно-силовой регулятор, поскольку максимальная касательная сила тяги трактора достигается при Yо=0 когда вся сила Rхоtgθ догружает ведущие колеса трактора. Это наиболее эффективно именно для работы с плугом, поскольку он обладает наибольшим тяговым сопротивлением. Однако это требует применения автоматического устройства, управляющего гидроцилиндром навесной системы и обеспечивающего заданную глубину вспашки.
При использовании навесных орудий, обрабатывающих почву на небольшую глубину (например, культиваторов), погрешность регулирования глубины обработки позиционно-силовым регулятором может оказаться соизмеримой с заданной глубиной обработки. Тогда заданное агротехническое качество операции не обеспечивается. Поэтому при поверхностной обработке почвы необходимо использовать более точные способы регулирования глубины хода рабочих органов.
Способ регулирования навесной системы, помимо агротехнических показателей, влияет также на среднее значение тягового сопротивления, создаваемого навесной машиной. Например, силовой способ регулирования поддерживает заданную силу сопротивления за счет изменения глубины обработки почвы. При этом отмечается экономия топлива и повышение средней скорости движения и производительности МТА.
5.4. Центр давления и сцепные свойства гусеничного трактора
Центром давления называют точку приложения нормальной результирующей реакции почвы на гусеницу. В общем случае центр давления не совпадает с серединой опорной поверхности гусениц по длине или с координатой центра масс трактора.
На рисунке 5.5 координата центра давления обозначена Dr, а продольное расстояние между серединой гусеницы и центром давления — ад. Центр масс трактора расположен в точке О. Чтобы найти зависимость между положением центра давления и параметрами трактора, а также тяговой нагрузкой, запишем уравнение моментов внешних сил и реакций, действующих на трактор относительно точки Dr,
Gэcosα(ад+а0)=(Рj+Gэsinα)hц+Ркрcosγhкp+Xnhx+Pкpsinγ(ац-a0-ад).
Величина Xnhxпредставляет собой момент сопротивления качению Mf. Как правило, угол γ≤15°. Примем cosγ=1. С учетом этого определим смещение центра давления относительно середины опорной поверхности гусеницы
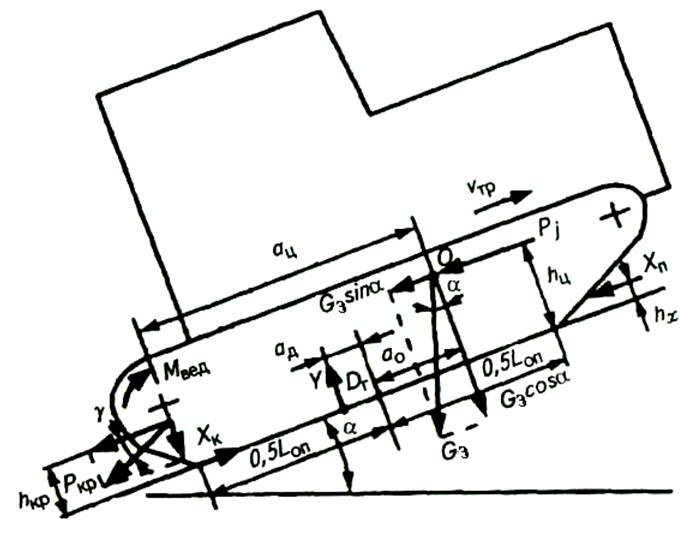
Рисунок 5.5 - Схема сил и моментов, действующих на гусеничный трактор
При равномерном движении на горизонтальном участке
 (5.17)
(5.17)
Учет наклонного действия тягового сопротивления несущественно влияет на величину смещения ад. Указанное позволяет выявить наиболее значимые факторы, определяющие продольную координату центра давления:
ад=Ркрhкр/Gэ–ао, (5.18)
или
ад=φкрhкр–ао, где φкр=Ркp/Gтp — коэффициент использования сцепного веса трактора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.