Санкт-Петербургский государственный технический университет Факультет Технической Кибернетики
Кафедра Компьютерных Систем и Программных Технологий
ЛАБОРАТОРНАЯ РАБОТА №6
Дисциплина: Моделирование систем управления
Тема: Моделирование детерминированных процессов
Выполнил студент гр. 4081/1
Руководитель, к.т.н., доцент
"___ "__________ 2011 г.
Задано:
a = 0.25, b = 0.25, c = 1
![]()
![]()
1. Моделирование процессов 1 порядка.
![]()
![]()
1) ![]()
![]()
2)![]()
![]()
![]()
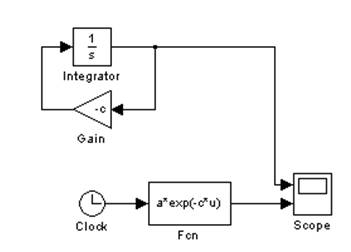
Рис. 1.1. Модель g0 в Simulink
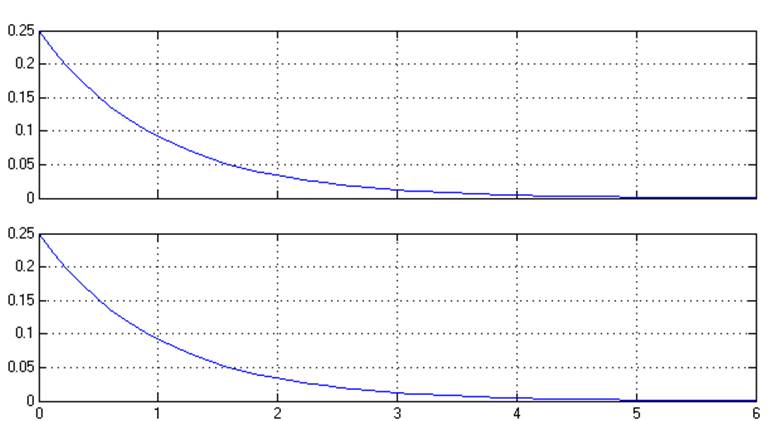
Рис. 1.2. Результаты моделирования
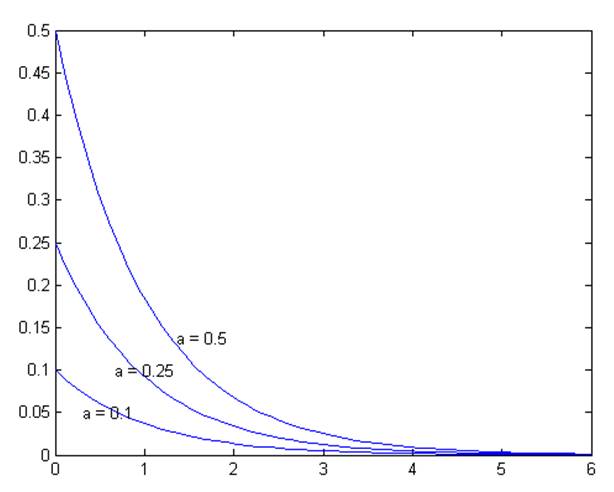
Рис. 1.3. Варьирование параметра а (влияет на начальное значение)
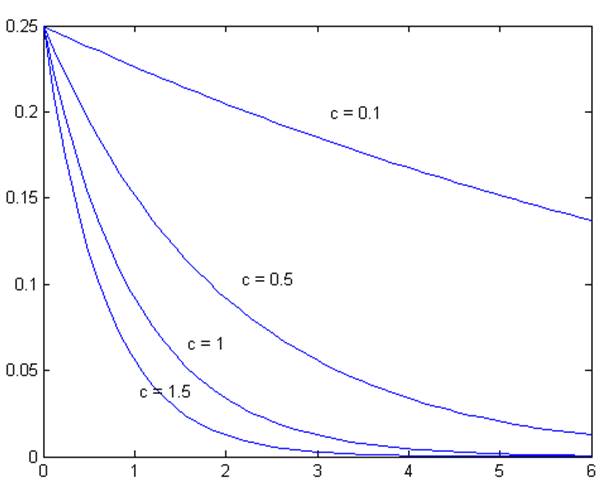
Рис. 1.4. Варьирование параметра с (увеличение – увеличение скорости переходного процесса)
2. Моделирование процессов 3 порядка.
![]()
a = 0.25, b = 0.25, c = 1
Начальные условия:
g0 = a = 0.25
g1 = b = 0.25
g2 = -2cb = -0.5
Начальные значения для интеграторов:
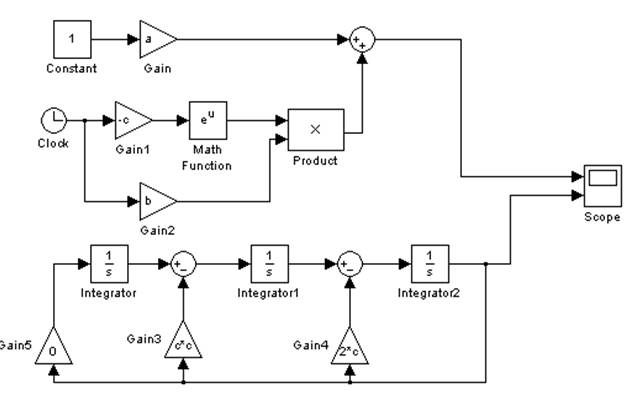
Рис. 2.1. Модель g1 в Simulink
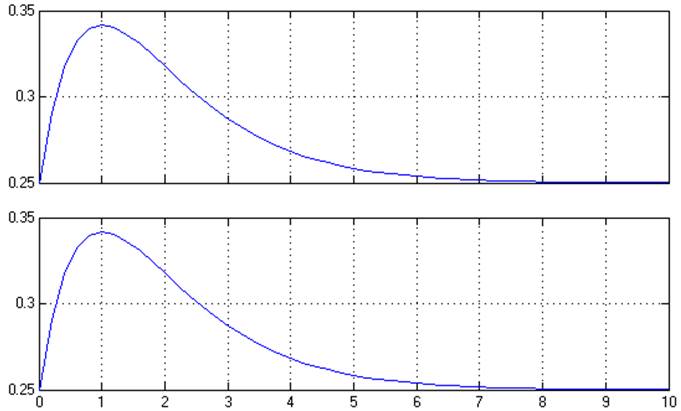
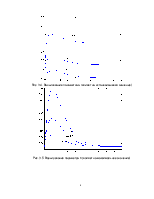
Рис. 2.2. Результаты моделирования
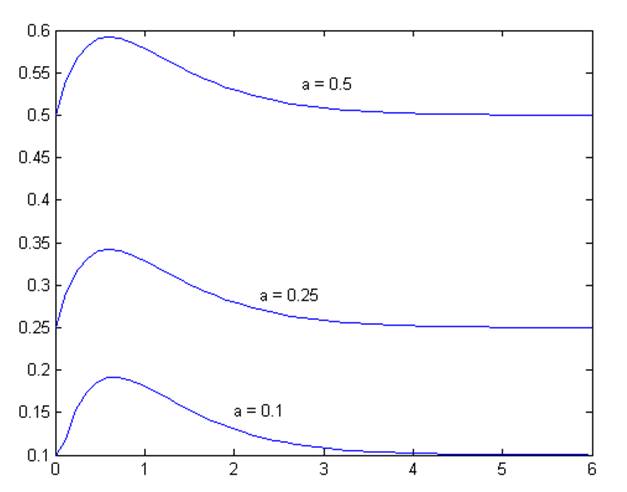
Рис. 2.3. Варьирование параметра а (влияет на начальное значение)
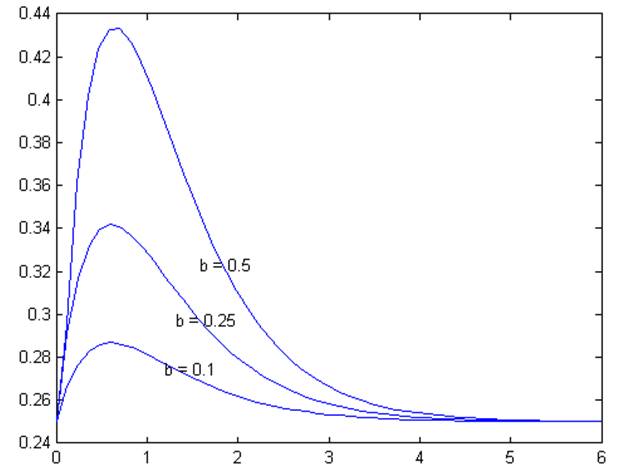
Рис. 2.4. Варьирование параметра b (влияет на максимальное значение)
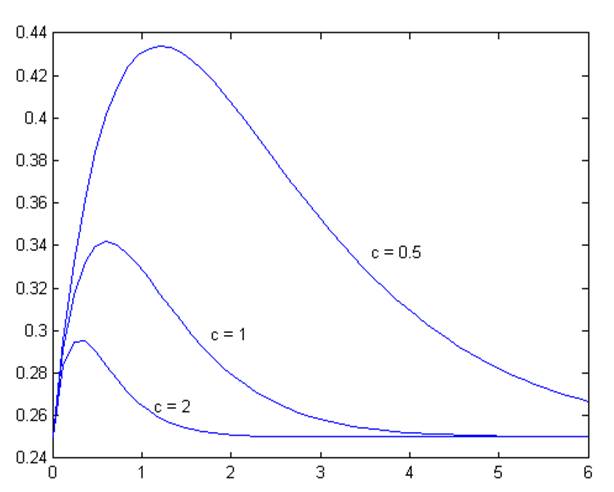
Рис. 2.5. Варьирование параметра с (увеличение – увеличение скорости переходного процесса)
3. Линейно-параметрическая модель.
Полином:
![]()
m1 = 9, m2 = 23, m3 = 15

![]()
Обратное преобразование Лапласа:
>> a=0.25;b=0.25;c=1;
>> m1=9;m2=23;m3=15;
>> syms s
>> ilaplace((a*s^2+(2*a*c+b)*s+a*c^2)/(s^3+m1*s^2+m2*s+m3))
11/32*exp(-5*t)-1/16*exp(-3*t)-1/32*exp(-t) = σ(t)
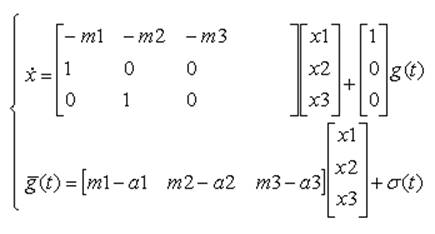
Структура
дифференциальной динамической модели детерминированного процесса ![]() g1(t):
g1(t):

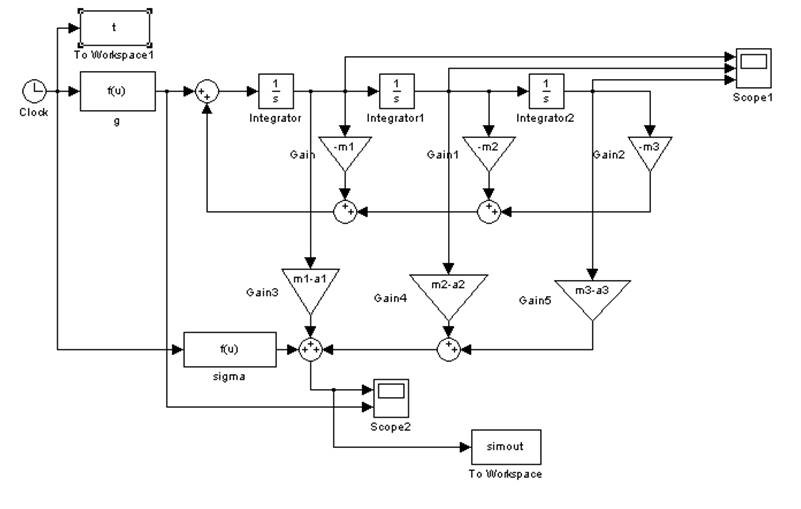
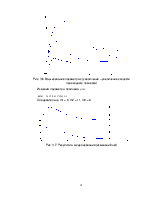
Рис. 3.1. Линейно – параметрическая модель g1
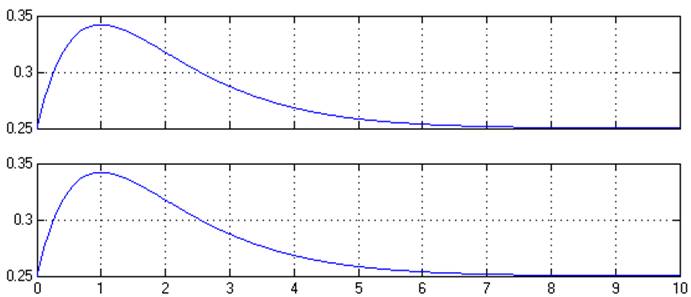
Рис. 3.2. Результаты моделирования
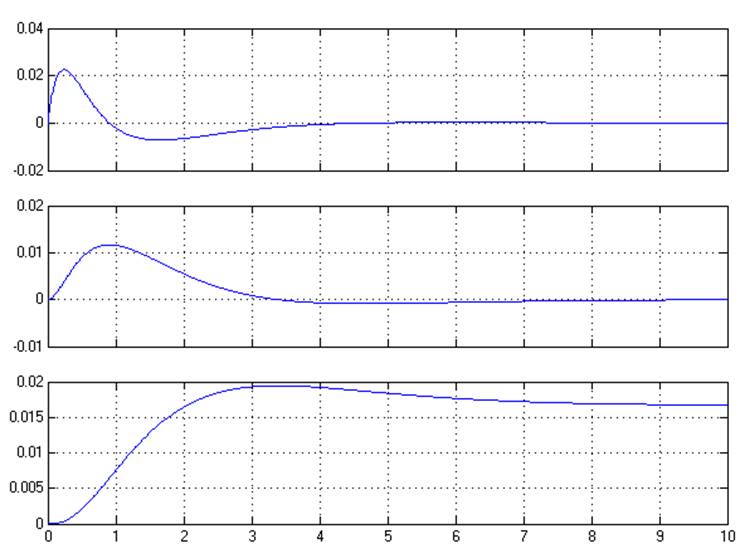
Рис. 3.3. Графики переменных состояния (х1, х2, х3)
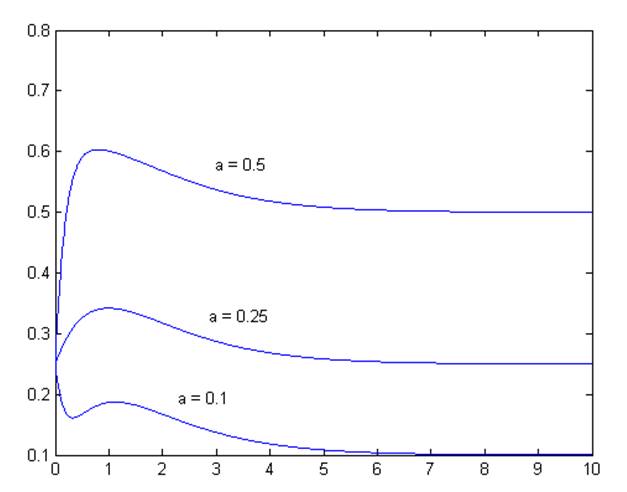
Рис. 3.4. Варьирование параметра а (влияет на установившееся значение)
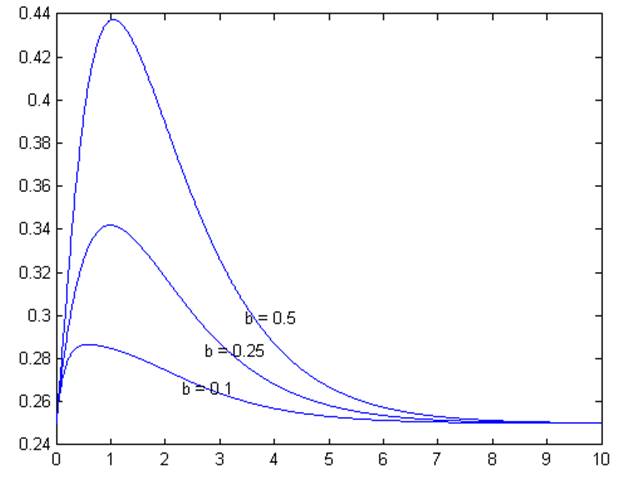
Рис. 3.5. Варьирование параметра b (влияет на максимальное значение)
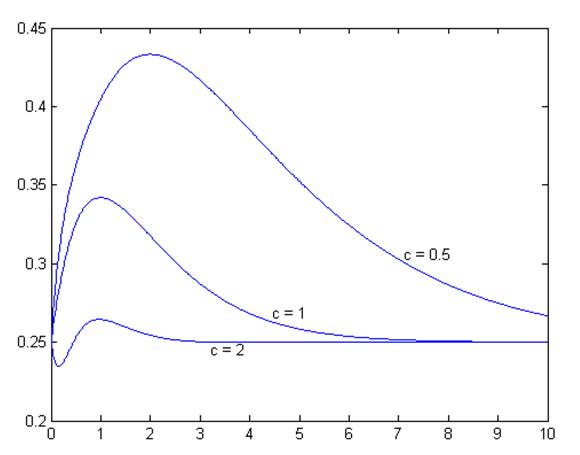
Рис. 3.6. Варьирование параметра с (увеличение – увеличение скорости переходного процесса)
Изменим параметры
полинома ![]() :
:
![]()
Следовательно, m1 = 6, m2 = 11, m3 = 6
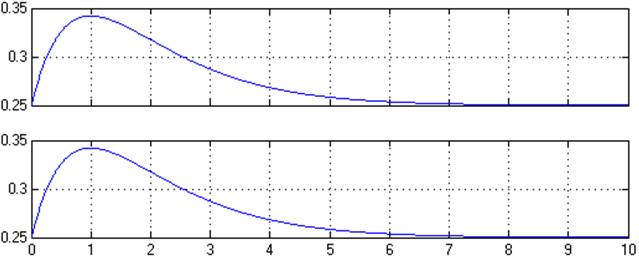
Рис. 3.7. Результаты моделирования (изменений нет)
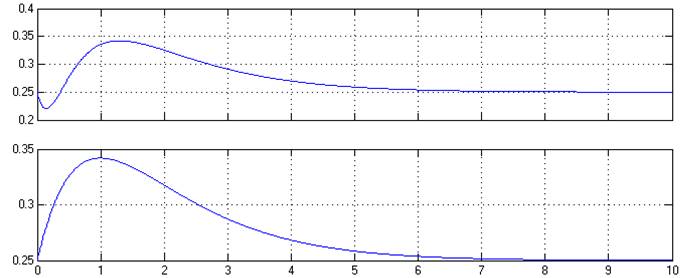
Рис. 3.8. Результаты моделирования (изменений при неизменной σ(t))
|
m1 |
m2 |
m3 |
tсовпад, с |
|
6 |
11 |
6 |
0.9 |
|
9 |
23 |
15 |
0 |
|
8 |
19 |
12 |
0.7 |
|
11 |
38 |
40 |
2.4 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.