Федеральное агентство по образованию
Государственное Образовательное Учреждение
Высшего Профессионального Образования
Рязанский государственный радиотехнический университет
Кафедра АИТУ
Курсовая работа по дисциплине:
«Автоматизация проектирования систем и средств управления»
Тема работы:
«Система сопровождения объектов с двумя платформами»
Выполнил: студент группы 430
Проверил:
Рязань, 2008
Содержание
Описание системы.. 3
Задание. 7
Порядок выполнения работы.. 7
Исходные данные. 10
Идентификация приводов. 11
Выбор корректирующих звеньев. 16
Математическое описание цифрового ПИ-регулятора. 16
Математическое описание цифрового корректирующего устройства. 18
Разработка цифрового ПИ-регулятора и цифрового корректирующего устройства на основе S-функции. 19
Настройка замкнутого контура. 25
Исследования работы системы сопровождения объектов по каналу углов азимута и места. 34
Исследования работы системы сопровождения объектов с учетом неравномерности вращения платформы 1. 42
Разработка фильтра. 45
Приложение. 48
Библиографический список. 49
Описание системы
В системах сопровождения (СС) для уменьшения ошибок в переходных режимах и повышения точности совмещения оптической оси видеодатчика (ВД) с направлением на объект могут использоваться исполнительные устройства с двумя опорно-поворотными платформами. Первая платформа обеспечивает быстрый разворот оптической оси ВД в сторону сопровождаемого объекта, однако точность сопровождения объекта при помощи такого исполнительного устройства остается низкой. Поэтому для уменьшения ошибки сопровождения на первой платформе устанавливается вторая для более точного совмещения оптической оси с направлением на объект. Применение двух опорно-поворотных платформ для совмещения оптической оси ВД с направлением на объект уменьшает динамические ошибки сопровождения, обеспечивает возможность отворота первой платформы от направления на объект без перерыва процесса сопровождения.
|
|
|
Рисунок 1 – Структурная схема СС с двумя опорно-поворотными платформами |
В некоторых других случаях применение в оптико-механических системах сопровождения объектов двух опорно-поворотных платформами обусловлено конструктивными особенностями.
В рассматриваемой задаче сопровождения объектов самоходная установка, на которой размещена опорно-поворотная платформа (платформа 1) представляет некоторый носитель для систем сопровождения (СС) (рисунок Рисунок 2). Опорно-поворотная платформа носителя СС способна вращаться исключительно в горизонтальной плоскости носителя. Оптико-механическая система автоматического сопровождения объектов (система сопровождения), размещенная на опорно-поворотной платформе 1, имеет возможность менять направление оптической оси видеодатчика (ВД) как в горизонтальной плоскости носителя, так и в перпендикулярной ей плоскости.
|
|
|
Рисунок 2 – Схема самоходной установки |
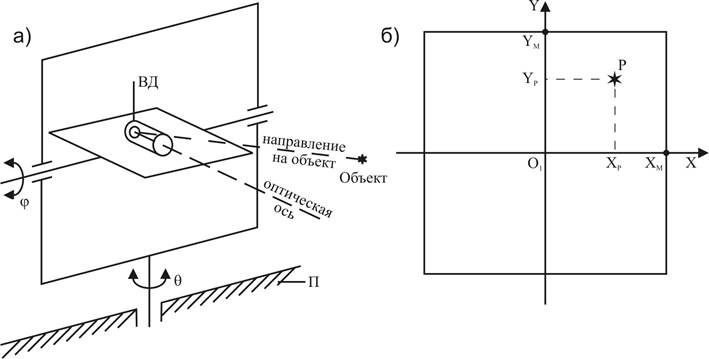
Основной задачей системы
сопровождения является непрерывное совмещение оптической оси ВД с направлением
на объект, наблюдаемый на изображении, формируемом ВД. Управление положением
оптической оси ВД в пространстве осуществляется с помощью двух приводов
(рисунок Рисунок 3, а), один из которых изменяет угол
поворота ![]() внешней рамки
двухосной карданной системы относительно платформы П, а другой привод изменяет
угол
внешней рамки
двухосной карданной системы относительно платформы П, а другой привод изменяет
угол ![]() положения
внутренней рамки с закрепленным на ней ВД относительно внешней рамки.
Направление оптической оси ВД перпендикулярно оси вращения внутренней рамки. На
изображении объект (центр изображения объекта) представлен точкой Р (рисунок Рисунок 3, б).
положения
внутренней рамки с закрепленным на ней ВД относительно внешней рамки.
Направление оптической оси ВД перпендикулярно оси вращения внутренней рамки. На
изображении объект (центр изображения объекта) представлен точкой Р (рисунок Рисунок 3, б).
|
|
|
Рисунок 3– Двухосная карданная система (а) и плоское изображение (б) |
Отслеживание положения объекта в пространстве по углу азимута осуществляется двумя платформами (платформой 1 носителя и внешней рамкой карданного подвеса СС), которые включены в азимутальный контур следящей системы таким образом, что в состоянии равновесия системы направление продольной оси платформы 1 и оптической оси ВД совпадают с направлением на отслеживаемый объект. Отслеживание по углу места в системе координат носителя происходит при помощи вращения только внутренней рамки кардана;
Пусть положение объекта в
пространстве относительно неподвижно ориентированной системы координат, центр
которой совпадает с центром системы координат строительных осей носителя
(совпадает с центром носителя), определяется углами ![]() и
и ![]() . Углы поворота СС
. Углы поворота СС ![]() и
и ![]() выдаются соответствующими
цифровыми датчиками углов поворота рамок карданного подвеса с частотой
дискретизации системы управления (указана в вариантах задания). Угол поворота
платформы 1 в горизонтальной плоскости
выдаются соответствующими
цифровыми датчиками углов поворота рамок карданного подвеса с частотой
дискретизации системы управления (указана в вариантах задания). Угол поворота
платформы 1 в горизонтальной плоскости ![]() выдается цифровым датчиком
угла поворота платформы.
выдается цифровым датчиком
угла поворота платформы.
Функциональная схема системы сопровождения объектов по углу азимута представлена на рисунке Рисунок 4.
|
|
|
Рисунок 4 – Функциональная схема системы по углу азимута |
Функциональная схема системы сопровождения объектов по углу места представлена на рисунке Рисунок 5 .
|
|
|
Рисунок 5 – Функциональная схема системы по углу места |
Блок обработки
изображения и формирования управления определяет координаты центра изображения
объекта ![]() и
и ![]() в плоскости изображения
каждого видеокадра, формируя при этом сигнал рассогласования, который подается
на замкнутый следящий контур СС и сумматор на входе следящего контура платформы
1.
в плоскости изображения
каждого видеокадра, формируя при этом сигнал рассогласования, который подается
на замкнутый следящий контур СС и сумматор на входе следящего контура платформы
1.
Оптической оси ВД
соответствует точка ![]() на
изображении. Считается известным угловое поле зрения ВД, которому соответствует
прямоугольное изображение (рисунок Рисунок 3, б). По измеренным значениям
координат объекта
на
изображении. Считается известным угловое поле зрения ВД, которому соответствует
прямоугольное изображение (рисунок Рисунок 3, б). По измеренным значениям
координат объекта ![]() ,
, ![]() , преобразованным в угловые
координаты
, преобразованным в угловые
координаты ![]() и
и ![]() , показаниям датчиков углов
поворотов рамок кардана
, показаниям датчиков углов
поворотов рамок кардана ![]() ,
, ![]() и угла
и угла ![]() поворота платформы 1 по
азимуту на момент получения видеокадра определяется рассогласование между
направлением оптической оси системы и направлением на объект. При этом величины
поворота платформы 1 по
азимуту на момент получения видеокадра определяется рассогласование между
направлением оптической оси системы и направлением на объект. При этом величины
![]() и
и ![]() будут представлять
рассогласование системы, а
будут представлять
рассогласование системы, а ![]() и
и
![]() в некоторой принятой системе
отсчета можно рассматривать как заданные значения углов, определяющих направление
на объект.
в некоторой принятой системе
отсчета можно рассматривать как заданные значения углов, определяющих направление
на объект.
Функциональная схема следящего привода представлена на рисунке
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.