3.1.2 Построение плана положений и планов скоростей механизма.
|
 |
|
|
 |
 |
Методом засечек строим двенадцать планов положений механизмов, приняв за нулевое такое положение, когда все звенья механизма выстроены в одну линию.
|
VC=ω1lОС;
|
 |
|
VC=6,8*0,13=0,88 м/с.
|
 |
Скорость точки D определим из следующих векторных уравнений:
|
VD┴OD.
Также можем составить аналогичную систему уравнению для определения скорости VB:
|
VB┴OB.
Численную величину абсолютной и относительной скоростей любой точки механизма определяется умножением соответствующего вектора скорости, взятого из плана скоростей, на масштабный коэффициент.
Из плана скоростей для первого положения:
VS2=PS2*μv=38*0,018=0,684 м/с;
Vb=Pb*μv=20*0,018=0,36 м/с;
Vab=ab*μv=45*0,018=0,81 м/с;
VS4=PS4*μv=40*0,018=0,72 м/с;
Vd=Pd*μv=30*0,018=0,54 м/с;
Vcd=cd*μv=45*0,018=0,81 м/с.
Результаты расчётов для всех двенадцати положений занесём в таблицу 2.
Таблица 2 – Определение скоростей точек механизма.
|
№ поло-жения |
Скорости точек, м/с. |
|||||||||||||
|
Vа |
VS2 |
Vb |
Vab |
Vc |
VS4 |
Vd |
Vcd |
|||||||
|
0 |
0,9 |
0,63 |
0 |
0,9 |
0,9 |
0,63 |
0 |
0,9 |
||||||
|
1 |
0,9 |
0,684 |
0,36 |
0,81 |
0,9 |
0,72 |
0,54 |
0,81 |
||||||
|
2 |
0,9 |
0,81 |
0,684 |
0,45 |
0,9 |
0,864 |
0,846 |
0,45 |
||||||
|
3 |
0,9 |
0,9 |
0,9 |
0 |
0,9 |
0,9 |
0,9 |
0 |
||||||
|
4 |
0,9 |
0,864 |
0,864 |
0,45 |
0,9 |
0,81 |
0,684 |
0,45 |
||||||
|
5 |
0,9 |
0,684 |
0,54 |
0,81 |
0,9 |
0,684 |
0,36 |
0,81 |
||||||
|
6 |
0,9 |
0,63 |
0 |
0,9 |
0,9 |
0,63 |
0 |
0,9 |
||||||
|
7 |
0,9 |
0,684 |
0,54 |
0,81 |
0,9 |
0,684 |
0,36 |
0,81 |
||||||
|
8 |
0,9 |
0,864 |
0,864 |
0,45 |
0,9 |
0,81 |
0,684 |
0,45 |
||||||
|
9 |
0,9 |
0,9 |
0,9 |
0 |
0,9 |
0,9 |
0,9 |
0 |
||||||
|
10 |
0,9 |
0,81 |
0,684 |
0,45 |
0,9 |
0,864 |
0,846 |
0,45 |
||||||
|
11 |
0,9 |
0,684 |
0,36 |
0,81 |
0,9 |
0,72 |
0,54 |
0,81 |
||||||
|
12 |
0,9 |
0,63 |
0 |
0,9 |
0,9 |
0,63 |
0 |
0,9 |
||||||
Определим угловые скорости звеньев:
ω1=6,8 рад/с; ω2i=Vabi/AB; ω4i=VCDi/CD; ω3=0; ω5=0.
Вычислим угловые скорости звеньев 2 и 4 для двенадцати положений и полученные данные занесём в таблицу 3.
Таблица 3 – Определение угловых скоростей механизма.
|
Пол-е |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
ω2 |
1,7 |
1,6 |
0,9 |
0 |
0,9 |
1,6 |
1,7 |
1,6 |
0,9 |
0 |
0,9 |
1,6 |
1,7 |
|
ω4 |
1,7 |
1,6 |
0,9 |
0 |
0,9 |
1,6 |
1,7 |
1,6 |
0,9 |
0 |
0,9 |
1,6 |
1,7 |
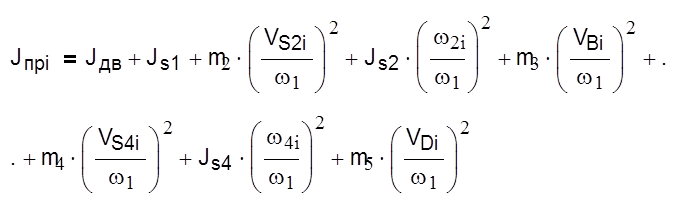
3.1.3 Построение графика приведённого к ведущему звену момента инерции механизма.
 |
|
Рассчитаем момент инерции для первого положения:
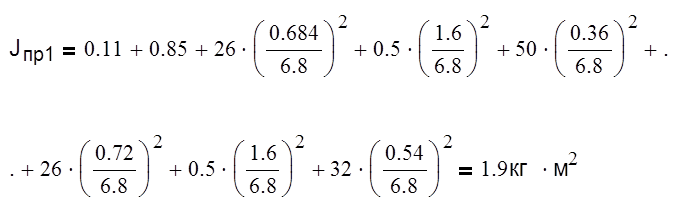 |
Таблица 4 – Определение приведённых моментов инерции механизма.
|
Пол-е |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Jпркгм2 |
1,5 |
1,9 |
2,8 |
3,3 |
2,9 |
1,9 |
1,5 |
1,9 |
2,9 |
3,3 |
2,8 |
1,9 |
1,5 |
|
 |
По полученным данным построим график приведённых моментов инерции механизма.
3.1.4 Построение графика моментов сил сопротивления и движущих сил.
Для определения моментов сил сопротивления определим приведённую силу, приложенную к ведущему звену.
На повёрнутых планах скоростей к центрам тяжестей звеньев приложим силы тяжести GB, GD, G2 и G4, к точкам В и D силы, действующие на поршни, к точке А, перпендикулярно звену АС приведённую силу, которую направим против движению ведущего звена.
Силы тяжести каждого звена механизма определим по формуле:
Gi=mig, (13)
где mi- масса i-ro звена, кг; g - ускорение свободного падения, g = 9,81 м\с.
Тогда силы тяжести для звеньев будут равны:
GВ=m3g=50*9,81=490 Н.
GD=m5g=32*9,81=313,6 Н.
GS2= GS4=mS2g=26*9,81=254,8 Н
Для определения сил сопротивления строятся индикаторные диаграммы, по которым определяется давление в цилиндрах. Для построения диаграммы используем значения из таблицы 5.
Таблица 5 - Зависимость давления воздуха от перемещения поршня.
|
Относительное перемещение поршня |
0,0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
|
Давление в цилиндре |
1 ступень, вверх Р1/Р1max движение вниз |
1,00 1,00 |
1,00 0,30 |
1,00 0,00 |
0,55 0,00 |
0,38 0,00 |
0,27 0,00 |
0,18 0,00 |
0,12 0,00 |
0,08 0,00 |
0,04 0,00 |
0,00 0,00 |
|
2 ступень, вверх Р2/Р2max движение вниз |
1.00 1.00 |
1.00 0.54 |
1.00 0.30 |
0.70 0.30 |
0.59 0.30 |
0.50 0.30 |
0.42 0.30 |
0.37 0.30 |
0.34 0.30 |
0.32 0.30 |
0.30 0.30 |
|
|
 |
Fc=p*S, (15)
где S – площадь поршня, p – давление в цилиндре.
S=πd2/4; (16)
Для первого положения:
FСВ=0,0054*106*0,107=577,8 Н;
FСD=0,468*106*0,035=16380 Н.
Полученные значения сил сопротивления и давлений в цилиндрах занесём в таблицу 6:
Таблица 6 – Значения сил сопротивления.
|
Пол-е |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
РВ, МПа |
0 |
0,005 |
0,022 |
0,051 |
0,151 |
0,25 |
0,25 |
0,094 |
0 |
0 |
0 |
0 |
0 |
|
РD, МПа |
0,84 |
0,468 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,26 |
0,288 |
0,36 |
0,673 |
0,84 |
0,84 |
|
FСВ, Н |
0 |
577,8 |
2311 |
5478 |
16178 |
26750 |
26750 |
10015 |
0 |
0 |
0 |
0 |
0 |
|
FСD, Н |
29400 |
16380 |
8750 |
8750 |
8750 |
8750 |
8750 |
9100 |
10080 |
12600 |
23555 |
29400 |
29400 |
|
Находим приведённую силу. Для первого положения:
FСВ*30+GD*30-GS2*27+GS4*24+GВ*20+FСD*20-Fпр*50=0
Подставив численные значения, получим: Fпр=6891 Н.
Приведенный момент будет равен: Мпр=Fпр*lОА=6891*0,13=895
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

