Лабораторная работа
ИССЛЕДОВАНИЕ ТИРИСТОРНОГО ПРИВОДА
ПОСТОЯННОГО ТОКА
Цель работы: ознакомиться с устройством и принципом работы тиристорного привода постоянного тока, его системой управления. Изучить характеристики тиристорного привода.
ОСНОВНЫЕ ПОНЯТИЯ
Тиристорный привод постоянного тока применяется как в общепромышленных, так и подъемно-транспортных машинах: кранах, лифтах, экскаваторах и других механизмах.
Питание электрического двигателя постоянного тока осуществляется от сети переменного тока через вентильный преобразователь. Все схемы вентильных преобразователей делятся на нулевые и мостовые.
Мостовые схемы, содержащие только управляемые и неуправляемые вентили – несимметричными или полууправляемыми. В лабораторной работе используется нереверсированный полууправляемый вентильный преобразователь.
Управление вентильными преобразователями осуществляется с помощью систем импульсно-фазавого управления (СИФУ). Основной задачей СИФУ является получение требуемой зависимости среднего значения выпрямленного напряжения Ud вентильного преобразователя от напряжения управления Uупр. В идеальном случае
Ud=kUупр, где: к – постоянная величина, не зависящая от режима питающей сети и от нагрузки в цепи выпрямленного тока.
Воздействие на напряжение Ud осуществляется путем изменения угла управления α . Устройство, осуществляющее изменение угла управления α в зависимости от напряжения управления Uупр, называется системой импульсно-фазавого управления.
Управление углом α осуществляется в основном двумя способами: синхронным или асинхронным. Синхронный способ характеризуется отсчетом угла управления от определенной фазы напряжения питающей сети, асинхронный – регулированием интервалов между импульсами управления без однозначной, явно выраженной «привязки» к фазе питающей сети.
Для получения регулируемого угла задержки наиболее широко применяется принцип вертикального управления, сущность которого состоит в определении моментов времени, когда изменяется знак суммы развертывающего периодического сигнала, синхронного с напряжением сети питания преобразователя, и сигнала управления.
Часто развертывающий периодический сигнал получают с помощью генераторов пилообразного напряжения (ГПН).
Частота вращения n электродвигателя определяется по выражению ![]() , где: Udo – среднее
значение выпрямительного напряжения при α =0;
, где: Udo – среднее
значение выпрямительного напряжения при α =0;
Id – среднее значение выпрямленного тока;
Rэ – эквивалентное сопротивление якорной цепи двигателя;
ΔUd – падение напряжения на вентилях;
α – угол управления.
Из-за малой жесткости естественной механической характеристики частота вращения тиристорного привода при изменении нагрузки значительно колеблется, поэтому вентильные электроприводы постоянного тока обычно выполняются в виде замкнутых систем.
Во всех установках с тиристорами устанавливается эффективная защита от перегрузок, коротких замыканий и перенапряжений.
МЕТОДИКА ЭКСПЕРИМЕНТА.
Описание экспериментальной установки.
Схема лабораторной установки для испытания тиристорного привода изображена на рис.1 и содержит следующие элементы: блок регулирования (БР), блок силовых вентилей (БСВ), дросселя (ДР), электрический двигатель постоянного тока (М), задатчик скорости (ЗС) и тормозное устройство (Т).
Блок регулирования состоит из усилителя полупроводникового (УП), служащего для усиления управляющих напряжений и представляющего собой однокаскадный усилитель постоянного тока; генератора пилообразных напряжений (ГПН), служащего для создания пилообразных напряжений с частотой 100Гц; формирователя импульсов (ФИ), предназначенного для формирования прямоугольных импульсов, которыми отпираются тиристоры; блок питания (БП), служащего для создания напряжений питания цепей управления; схемы ограничения тока якоря двигателя (СОТ).
Блок силовых вентилей (БСВ) представляет собой полууправляемый выпрямительный мост, состоящий из вентилей Д1-Д2 и тиристоров Т1-Т2. БСВ предназначен для преобразования переменного напряжения в регулируемое выпрямленное напряжение, которое подается на якорь двигателя постоянного тока. Последовательно с якорем двигателя включен сглаживающий дроссель ДР, служащий для сглаживания
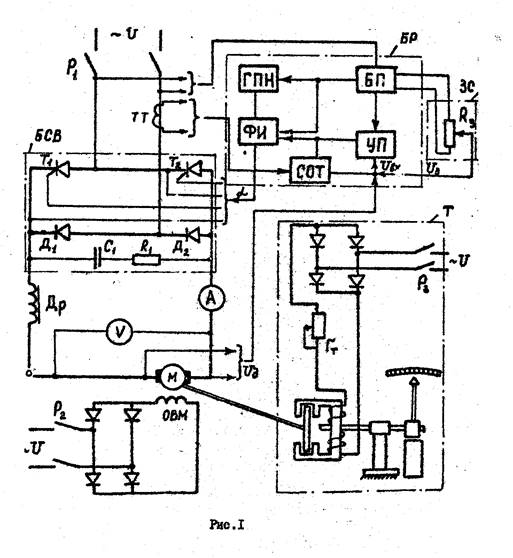
пульсаций. Выпрямленный ток на выходе БСВ содержит, кроме постоянной, переменную составляющую, которая приводит к дополнительному нагреву обмоток. Применение сглаживающего дросселя позволяет полнее использовать номинальную мощность электрического двигателя.
В качестве задатчика скорости ЗС используется потенциометр Rз, который служит для ручного задания частоты вращения электрического двигателя. Потенциометр выведен на панель лабораторного стенда. Нижнее положение ручки потенциометра соответствует минимальной частоте вращения якоря. Используя специальную шкалу, расположенную на потенциометре, можно задать частоту вращения якоря электрического двигателя в диапазоне от 700 об/мин до 3000 об/мин. Градуировка шкалы соответствует режиму холостого хода.
Тормозное устройство Т служит для нагрузки двигателя. Основными частями тормозного устройства являются массивный стальной диск, насаженный на вал электрического двигателя и подвижный четырехполюсный электромагнит с противовесом.
При вращении диска в магнитном поле электромагнита, в диске индуцируется ЭДС и протекают вихревые токи. При взаимодействии вихревых токов с магнитным полем электромагнита возникает тормозной момент. Такой же момент действует и на электромагнит, стремясь повернуть его в направлении вращения диска. Момент, действующий на электромагнит, уравновешивается противовесом. По углу поворота электромагнита судят о величине тормозного момента. Изменение величины тормозного момента. Изменение величины тормозного момента осуществляется с помощью реостата rт, установленного на панели лабораторного стенда.
Приемы экспериментальной работы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.