Исполнительные двигатели постоянного тока.
Исполнительные двигатели предназначены для преобразования управляющего электрического сигнала в угловое механическое перемещение вала в системах автоматики. Такие двигатели работают в условиях частых пусков и остановов, так как сигнал управления систематически меняется в соответствии с законом регулирования. Исполнительные двигатели иногда называют управляемыми.
В качестве исполнительных двигателей постоянного тока применяют двигатели с электромагнитным независимым возбуждением или с возбуждением постоянными магнитами. Наличие щетечно-коллекторного узла усложняет эксплуатацию исполнительных двигателей и делает их невозможным применение во взрывоопасных и пожароопасных средах. Механическое трение щеток о коллектор усложняет управление такими двигателями.
Однако исполнительные двигатели постоянного тока имеют ряд достоинств: и регулировочные характеристики практически прямолинейны, способы управления просты, габаритные размеры и масса меньше, чем у асинхронных двигателей.
В исполнительных двигателях постоянного тока с электромагнитным возбуждением применяют якорное и полюсное управление. В двигателях с возбуждением постоянными магнитами – только якорное управление.
При якорном управлении исполнительного двигателя с электромагнитным возбуждением (рис. 1, а) обмотка полюсов является обмоткой возбуждения ОВ, а обмотка якоря – обмоткой якоря. Во время работы исполнительного двигателя к обмотке возбуждения подводится неизменное напряжение постоянного тока Uв, на обмотку управления подается управляющий сигнал (напряжение управления) Uy, от блока управления БУ, являющегося элементом автоматической системы. Напряжение Uy подается в моменты времени, определяемые автоматической системой управления, когда требуется включение исполнительного двигателя. В двигателях с возбуждением постоянными магнитами обмотки возбуждением постоянными магнитами обмотка возбуждения отсутствует, и к двигателю подводят лишь управляющий сигнал (рис. 1.б).
При полюсном подключении обмотка якоря является обмоткой возбуждения ОВ, а обмотка полюсов – обмоткой управления ОУ (рис. 1.в). Для ограничения тока возбуждения Iв в неподвижном якоре, когда противо-ЭДС Eв=0, и в обмотке якоря походит ток короткого замыкания Iв=Iк=Uв/rв; при мощности двигателя более 10 Вт в цепь якоря последовательно включают добавочное сопротивление Rдоб.
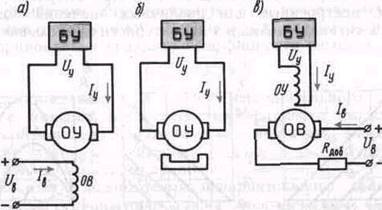
Рис. 1. Принципиальные схемы исполнительных двигателей постоянного тока с якорным (а, б) и полюсным (а) управлением
Изменение напряжения вращения исполнительного двигателя постоянного тока осуществляется изменением полярности управляющего сигнала.
При расчете относительных параметров исполнительных двигателей постоянного тока за базовую величину при определении относительного электромагнитного момента принимают начальный пусковой момент Мп.ном при номинальных напряжениях на обмотках ОВ и ОУ: m=М/Мп.ном. Уровень управляющего сигнала оценивается коэффициентом сигнала
a= Uу/Uв (1)
Исполнительные двигатели с якорным управлением. При якорном управлении самоход в двигателе не возникает, так как при снятии управляющего сигнала Uу=0, Iу=0, электромагнитный момент двигателя М=смФвIу=0.
Уравнение механической характеристики испоснительного двигателя при якорном управлении
m=a-v, (2)
где m=M/Mп.ном – относительный момент двигателя; Mп.ном – пусковой момент при a=1; v=n/n0 – относительная частота вращения двигателя; n0 – частота вращения двигателя при М=0.
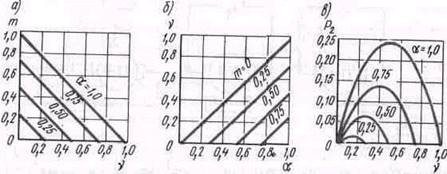
Рис. 2. Характеристики исполнительного двигателя с якорным управлением: механическая (а), регулировочная (б), механической мощности (в)
Из (2) следует, что механическая характеристика исполнительного двигателя постоянного тока m=f(v) при a=const прямолинейна. На рис. 3.а показаны механические характеристики двигателя при якорном управлении, построенные для различных значений коэффициента сигнала a. Анализ характеристик показывает, что механические характеристики прямолинейны и параллельны: двигатель развивает максимальный вращающий момент при пуске v=0; относительный пусковой момент равен коэффициенту сигнала (mп=a). Из (2) получим уравнение регулировочной характеристики двигателя
v=a–m, (3)
откуда следует, что регулировочная характеристика двигателя с якорным управлением v=f(a) при m=const прямолинейна.
Анализ этих характеристик (рис. 2.б), построенных для различных значений m, показывает, что частота
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.