




























БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
куросОВОЙ ПРОЕКТ
на тему
САУ ПЬЕЗОДВИГАТЕЛЯ
Пояснительная записка
УИТС.421311.011 ПЗ
2001
Содержание
Техническое задание................................................................................................ 3
Введение................................................................................................................... 4
1 Структурная схема САУ пьезодвигателя............................................................ 6
2 Выбор элементов системы.................................................................................... 7
2.1 Расчет передаточной функции пьезодвигателя.......................................... 7
2.2 Расчет передаточной функции датчика перемещений............................. 10
2.3 Расчет передаточной функции усилителя сигнала с датчика перемещений 11
2.4 Расчет передаточной функции усилителя сигнала с ЦАП....................... 12
2.5 Выбор микропроцессорного устройства, АЦП и ЦАП............................ 13
3 Расчет передаточной функции системы............................................................ 16
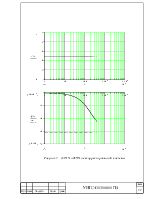
4 Построение ЛАЧХ и ФЧХ неизменяемой части системы................................ 19
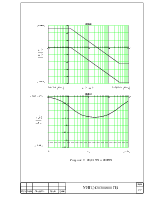
5 Построение ЖЛАЧХ и ЖФЧХ системы и их анализ........................................ 23
6 ЛАЧХ корректирующего устройства. Выбор корректирующего устройства. 29
Заключение............................................................................................................. 35
Список литературы................................................................................................ 36
Разрабатываемая САУ пьезодвигателя предназначена для управления приводов следящих систем c диапазоном перемещения порядка нескольких десятков микрометров.
Цель работы: разработать САУ пьезодвигателя, построить корректирующее устройство для заданной локальной системы автоматики так, чтобы система наилучшим образом отвечала заданным техническим требованиям и при этом была максимально проста.
Заданные технические требования сведены в таблицу 1.
Таблица 1 - Технические требования к САУ пьезодвигателя
|
Время регулирования tp, c |
0.5 |
|
Показатель колебательности, M |
1.01 |
|
Ошибка регулирования e, м |
3 10-3 |
|
Запас устойчивости по амплитуде DL, дБ |
не менее 12 |
|
Запас устойчивости по фазе Df, градус |
не менее 60 |
Одним из наиболее перспективных типов приводов следящих систем с ограниченным диапазоном перемещения порядка нескольких десятков микрометров в таких областях техники, как микроэлектроника, астрономия и космические исследования, является пьезоэлектрический привод микроперемещений. Исполнительный элемент пьезопривода представляет собой пьезопреобразователь, работающий на основе обратного пьезоэффекта, в котором эффект перемещения достигается продольной деформацией пьезоэлемента, получаемой приложением внешнего электрического напряжения. Применение пьезопривода микроперемещений решает задачи совмещения с точностью в сотые доли микрометра при отсутствии вибраций, компенсации температурных и гравитационных деформаций, а также атмосферной турбулентности путем коррекции волнового фронта.
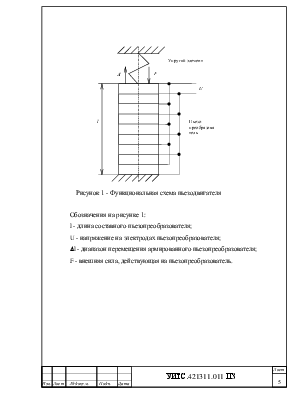
Пьезопреобразователь для приводов микроперемещений, функциональная схема которого приведена на рисунке 1, собирается следующим образом: предварительно сжатый для выбора зазоров составной пьезопреобразователь стягивается также предварительно деформированным упругим элементом в виде шпильки или мембраны. Удельное усилие сжатия берется около 5..8 МН/м2. При этом усилии выбираются зазоры, и зависимость деформации принимает линейный характер.
Основным параметром внешней нагрузки пьезопреобразователя является ее жесткость, т.е. отношение величины силы упругой реакции нагрузки к величине деформации нагрузки. В зависимости от жесткости нагрузки выбираются конструктивные параметры пьезопреобразователя.
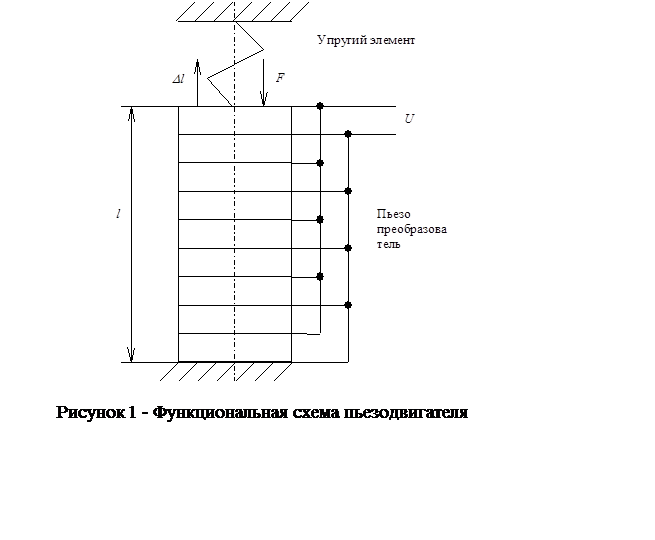 |
Обозначения на рисунке 1:
l - длина составного пьезопреобразователя;
U - напряжение на электродах пьезопреобразователя;
Dl - диапазон перемещения армированного пьезопреобразователя;
F - внешняя сила, действующая на пьезопреобразователь.
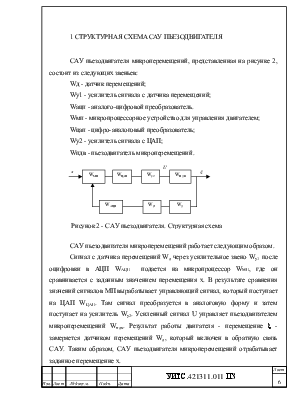
САУ пьезодвигателя микроперемещений, представленная на рисунке 2, состоит из следующих звеньев:
Wд - датчик перемещений;
Wу1 - усилитель сигнала с датчика перемещений;
Wацп - аналого-цифровой преобразователь.
Wмп - микропроцессорное устройство для управления двигателем;
Wцап - цифро-аналоговый преобразователь;
Wу2 - усилитель сигнала с ЦАП;
Wпдв - пьезодвигатель микроперемещений.
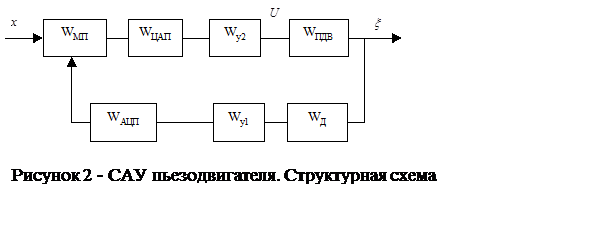 |
САУ пьезодвигателя микроперемещений работает следующим образом.
Сигнал с датчика перемещений Wд через усилительное звено Wу1 после оцифровки в АЦП WАЦП подается на микропроцессор WМП, где он сравнивается с заданным значением перемещения x. В результате сравнения значений сигналов МП вырабатывает управляющий сигнал, который поступает на ЦАП WЦАП. Там сигнал преобразуется в аналоговую форму и затем поступает на усилитель Wу2. Усиленный сигнал U управляет пьезодвигателем микроперемещений Wпдв. Результат работы двигателя - перемещение x - замеряется датчиком перемещений Wд, который включен в обратную связь САУ. Таким образом, САУ пьезодвигателя микроперемещений отрабатывает заданное перемещение x.
Передаточная функция пьезодвигателя [2, с.57]
 , (1)
, (1)
где p - оператор Лапласа, 1/с;
d33 - пьезомодуль, м/В;
Са - жесткость армирующего элемента, Н/м;
Сн - жесткость нагрузки, Н/м;
Ск - жесткость составного пьезопреобразователя, Н/м;
n - число пьезопластин;
Tм - постоянная времени пьезодвигателя, с;
xм - коэффициент затухания.
Жесткость составного пьезопреобразователя найдем по формуле:
![]() , (2)
, (2)
где Eю.к. - модуль Юнга пьезоэлектрической керамики, Н/м2;
Sк - площадь пьезопреобразователя, м2;
l - длина составного пьезопреобразователя, м.
Длина составного пьезопреобразователя
![]() , (3)
, (3)
где n - число пьезопластин;
d - толщина одной пьезопластины, м.
Толщина одной пьезопластины
![]() , (4)
, (4)
где Uм - амплитуда напряжения на электродах пьезпреобразователя, В;
E3м - амплитуда напряженности электрического поля в пьезоэлектрике, В/м.
Постоянная времени пьезодвигателя
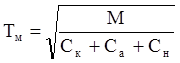 , (5)
, (5)
где M - масса нагрузки, кг.
Коэффициент затухания пьезодвигателя
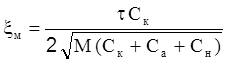 , (6)
, (6)
где t - постоянная времени установления деформации, с.
В качестве пьезопреобразователя используется широко доступная пьезокерамика марки ЦТС-19, основным достоинством которой является небольшое амплитудное значение питающего напряжения и высокое значение модуля Юнга керамики, что позволяет получать значительное перемещение пьезопреобразователя даже при низких напряжениях.
Для составного пьезопреобразователя из пьезокерамики ЦТС-19 имеем следующие значения [3]:
- пьезомодуль d33 = 5 10-10 , м/В;
- амплитуда напряжения на электродах пьезпреобразователя Uм = 15, В;
- амплитуда напряженности электрического поля в пьезоэлектрике E3м= 5.5 105, В/м;
-
толщина одной пьезопластины, найденная по формуле (4), ![]() , м;
, м;
- число пьезопластин n = 100, шт;
-
длина составного пьезопреобразователя, найденная по формуле (3), ![]() , м;
, м;
- пьезопластина представляет собой квадрат со стороной a = 1.5 10-3, м, тогда площадь пьезопреобразователя Sк = a2 = (1.5 10-3)2 = 2.25 10-6, м2;
- модуль Юнга пьезоэлектрической керамики Eю.к. = 2.2 1010, Н/м2;
- жесткость составного пьезопреобразователя, найденная по формуле
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.