






САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА КОМПЬЮТЕРНЫХ СИСТЕМ И ПРОГРАММНЫХ ТЕХНОЛОГИЙ
Отчет
по лабораторной работе №3
по МСУ
«Моделирование хаотических динамических систем»
Студент:
Группа: 4081/1
Преподаватель:
Санкт-Петербург
2011
1. Цель работы
Провести исследование хаотической системы в пакете Simulink.
2. Программа работы
· Преобразование исходного ДУ к виду системы ДУ первого порядка;
· Построить в Simulink модели для исследования заданной системы;
· Задать начальные условия для интеграторов, изходя из указанных начальных условий;
· Промоделировать систему при различных значениях параметров.
Табл. 2.1. Индивидуальные параметры
|
Вариант |
Наименование |
Уравнение |
Параметры, н.у |
|
6 |
Уравнение Дуффинга |
|
p=0.05 q=0 q0=1 f0=4.1 w=0.7 |
·
3. Выполнение работы
3.1. Преобразование исходного ДУ к виду системы ДУ первого порядка
![]()
![]()
![]()
3.2. Получение модели в Simulink
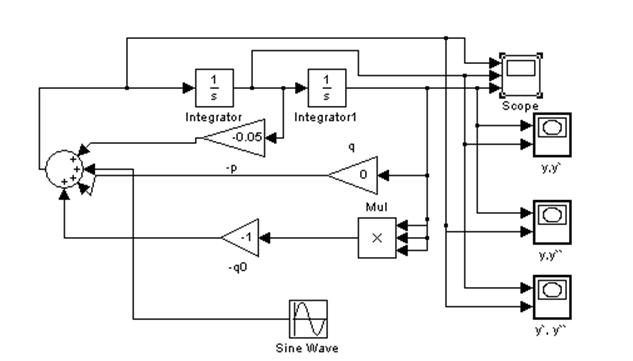
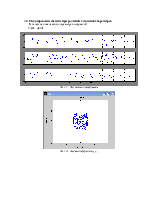
Рис 3.1. Схема модели
3.3. Моделирование системы при различных начальных условиях
В данном пункте работы будут варьироваться начальные условия для Integrator, Integrator1. Запись начальных условий задается в виде (Integrator,Integrator1)
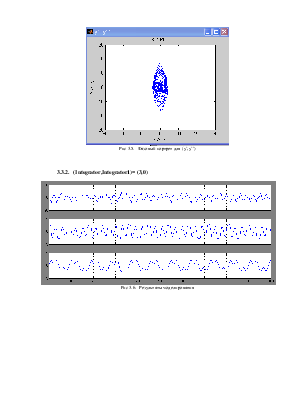
3.3.1. (Integrator,Integrator1)= (0,0)
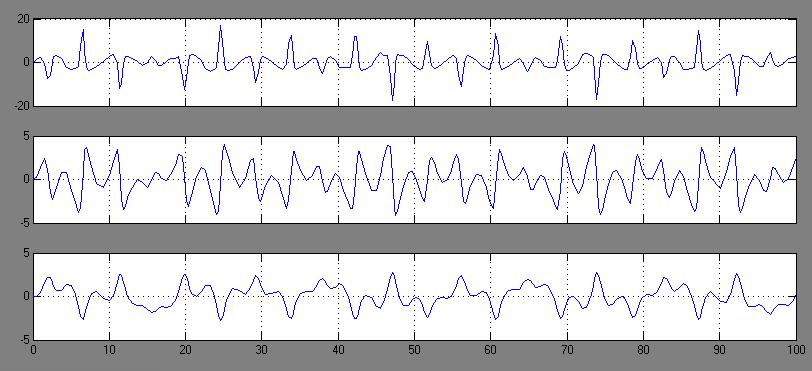
Рис 3.2. Результаты моделирования
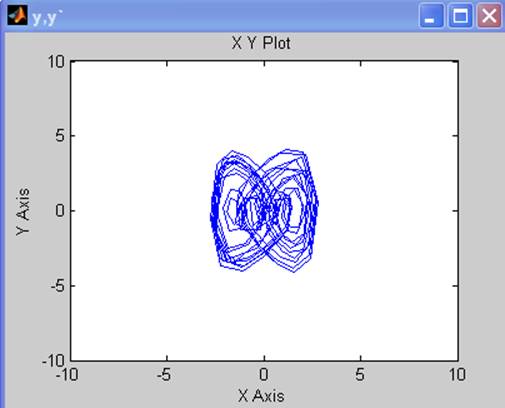
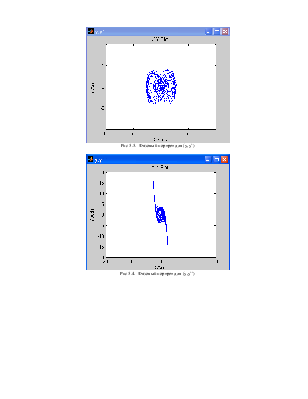
Рис 3.3. Фазовый портрет для (y,y`)
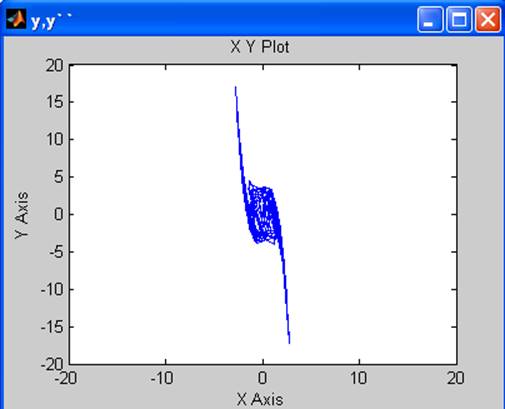
Рис 3.4. Фазовый портрет для (y,y``)
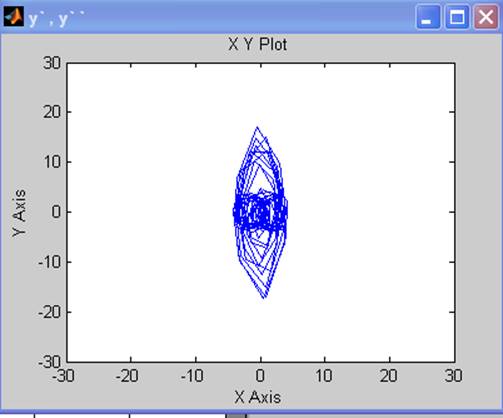
Рис 3.5. Фазовый портрет для (y`,y``)
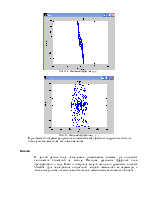
3.3.2. (Integrator,Integrator1)= (3,0)
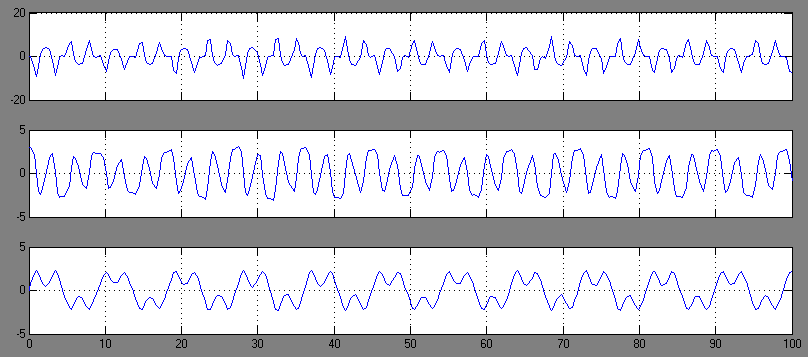
Рис 3.6. Результаты моделирования
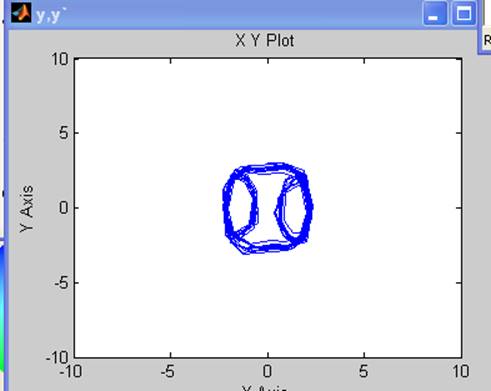
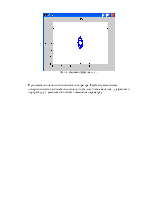
Рис 3.7. Фазовый портрет для (y,y`)
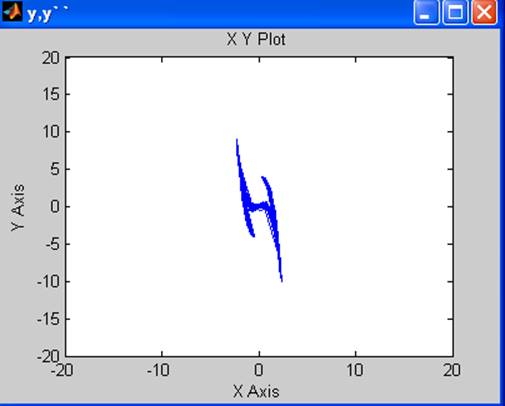
Рис 3.8. Фазовый портрет для (y,y``)
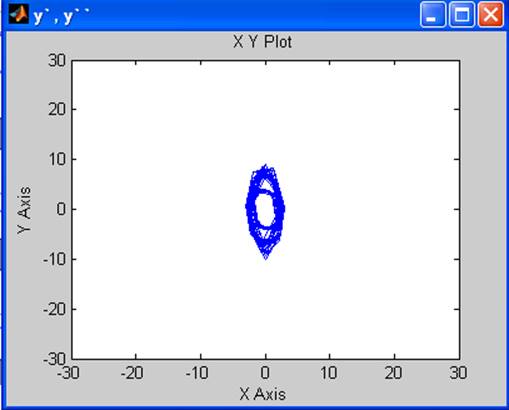
Рис 3.9. Фазовый портрет для (y`,y``)
При изменении начального значения интегратора Integrator уменьшилась «инерционность» хаотического сигнала, он стало активнее меняться, для фазового портрета (y,y`) уменьшалось область изменения параметра y`.
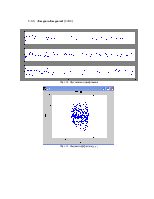
3.3.3. (Integrato,Integrator1)= (0,3)
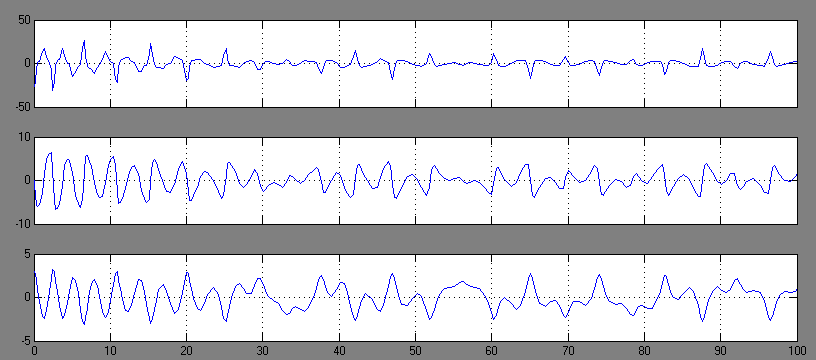
Рис 3.10. Результаты моделирования
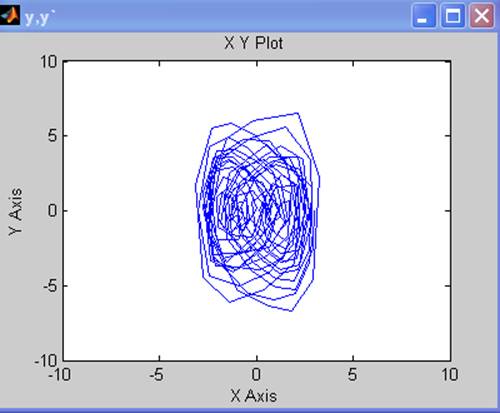
Рис 3.11. Фазовый портрет для (y,y`)
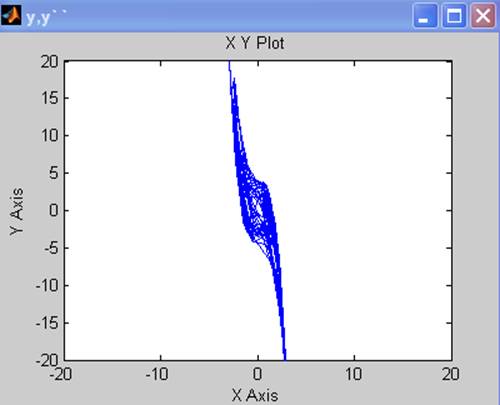
Рис 3.12. Фазовый портрет для (y,y``)
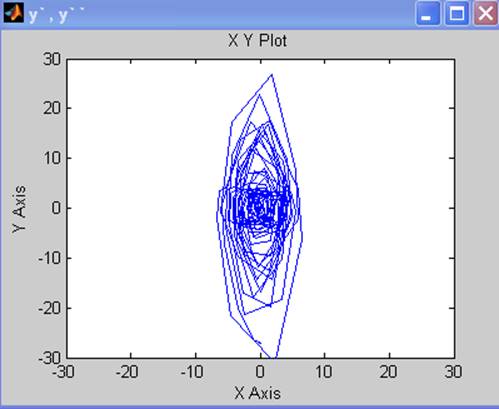
Рис 3.13. Фазовый портрет для (y`,y``)
При изменении начального значения интегратора Integrator1 уменьшилась плавность получаемого хаотического сигнала, для фазовогых портретов (y,y`), (y`,y``) увеличилась область изменения параметра y` и y`` соответственно.
3.4. Моделирование системы при различных значениях параметров
В качестве изменяемого параметра выберем q0.
3.4.1. q0=-1
Рис 3.14. Результаты моделирования
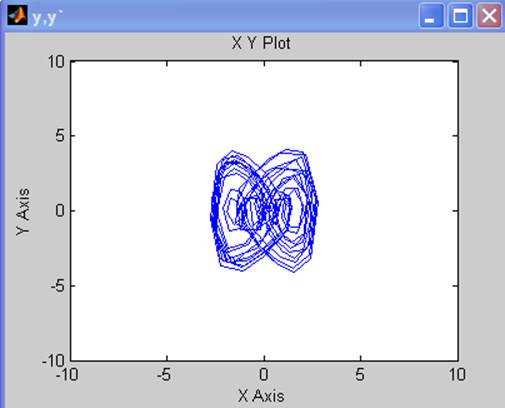
Рис 3.15. Фазовый портрет для (y,y`)
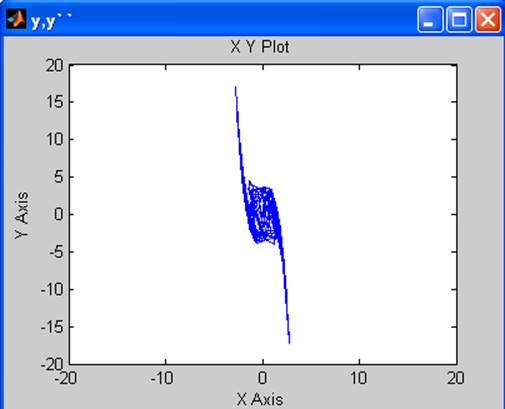
Рис 3.16. Фазовый портрет для (y,y``)
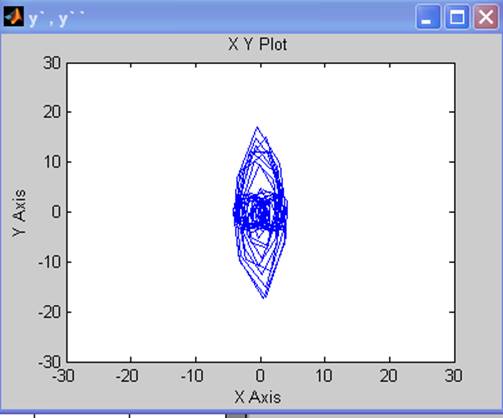
Рис 3.17. Фазовый портрет для (y`,y``)
3.4.2. q=-2
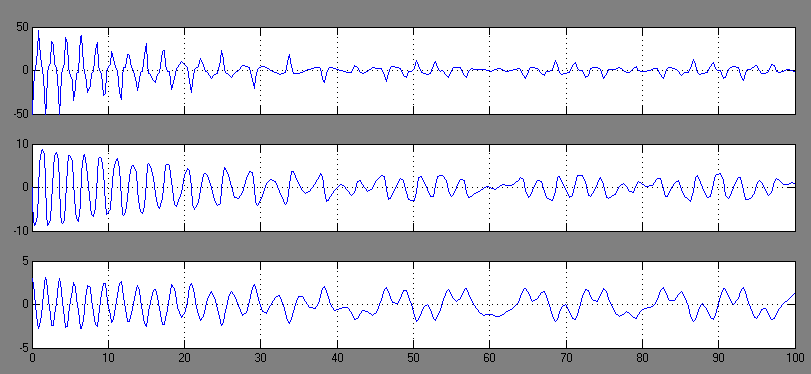
Рис 3.18. Результаты моделирования
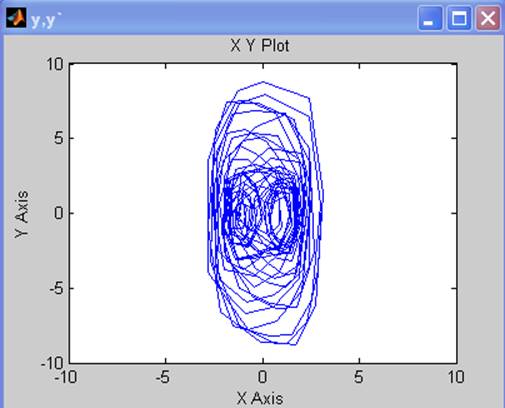
Рис 3.19. Фазовый портрет для (y,y`)
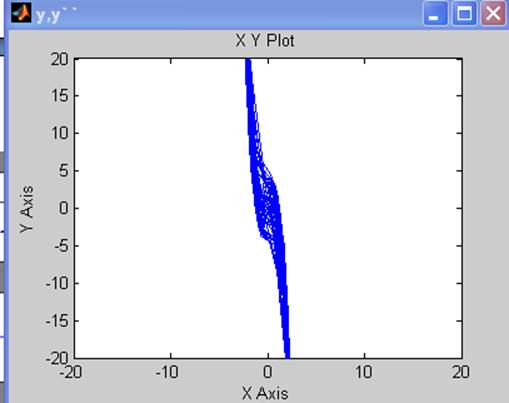
Рис 3.20. Фазовый портрет для (y,y``)
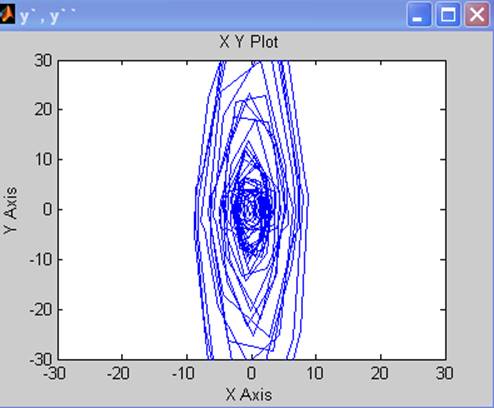
Рис 3.21. Фазовый портрет для (y`,y``)
При изменении параметра произошло изменение всех фазовых портретов, сигнал на выходе также изменился, стал чаще меняться.
Выводы
В данной работе была исследована динамическая система для получения хаотических колебаний на выходе. Исходное уравнение Дуффинга было преобразовано к виду Коши и построена модель исходного уравнения в пакете Simulink. Для исследования полученной модели изменялись ее параметры и начальные условия, на выходе мы наблюдали измененение хаотического сигнала.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.