Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ № 7
Дисциплина: моделирование СУ
Тема: Моделирование детерминированных процессов
Выполнили ст. группы 4081/2:
Преподаватель:
_______2008 г.
Санкт-Петербург 2008
1. Вариант задания
|
Вариант |
Функция |
|
|
|
|
25 |
|
1 |
0,25 |
0,5 |
![]()
2. Выполнение работы
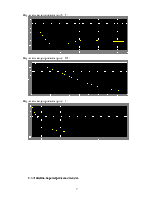
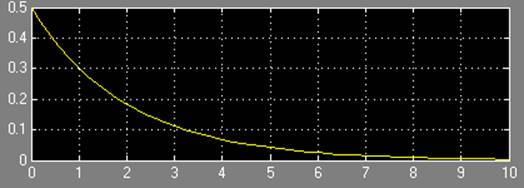
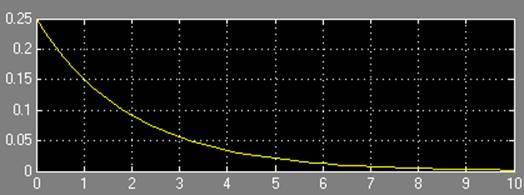
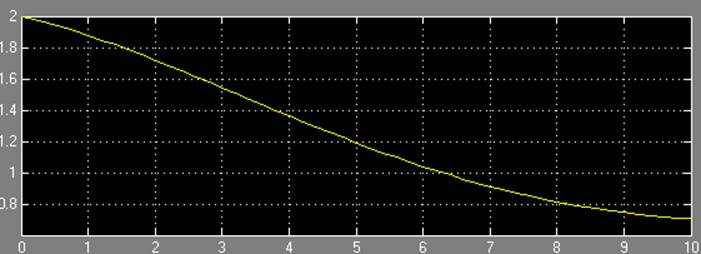
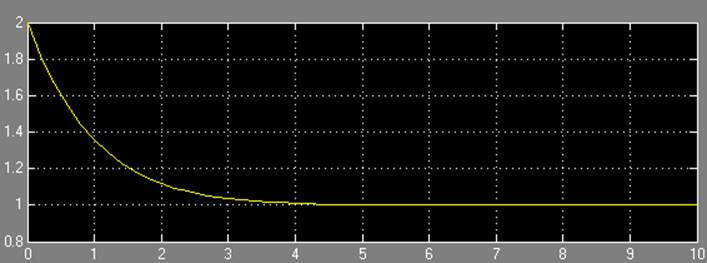
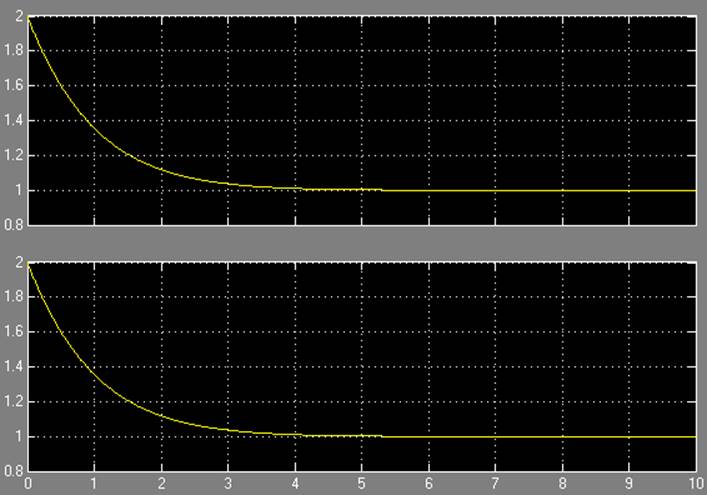
2.1. Моделирование процессов первого порядка
![]()
![]()
1)
![]()
2)
![]()
![]()
Построенная модель g0:
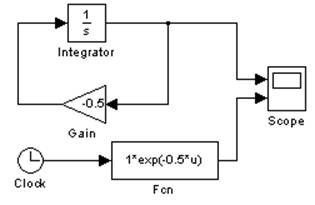
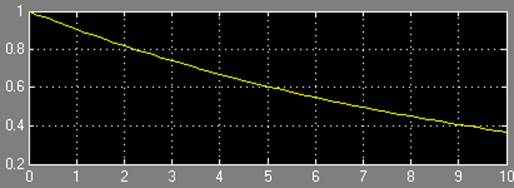
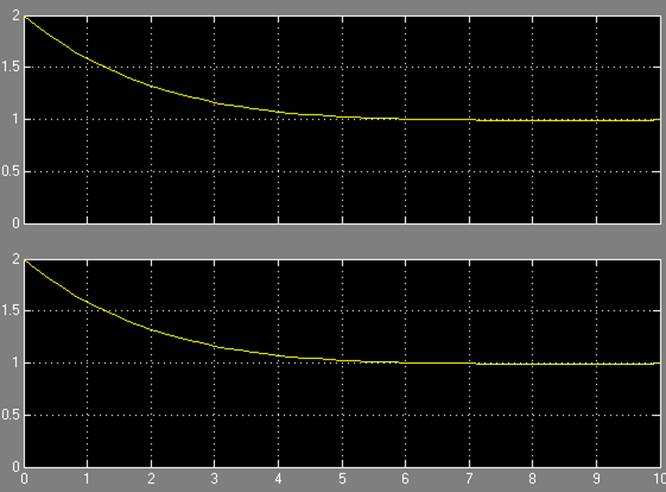
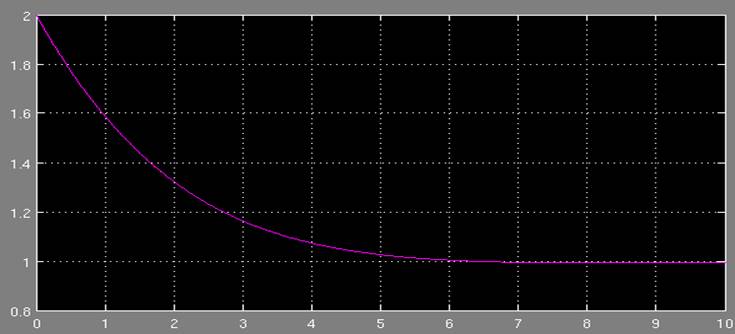
Результаты моделирования:
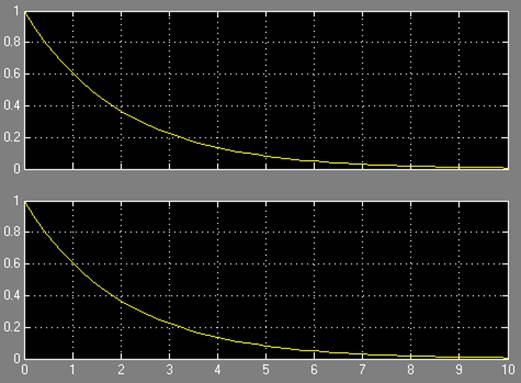
Результаты моделирования при a = 0.5:
Результаты моделирования при a = 0,25:
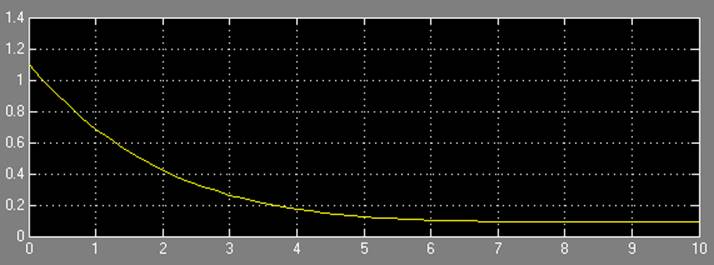
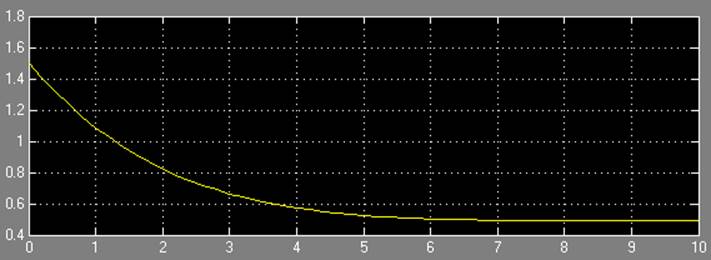
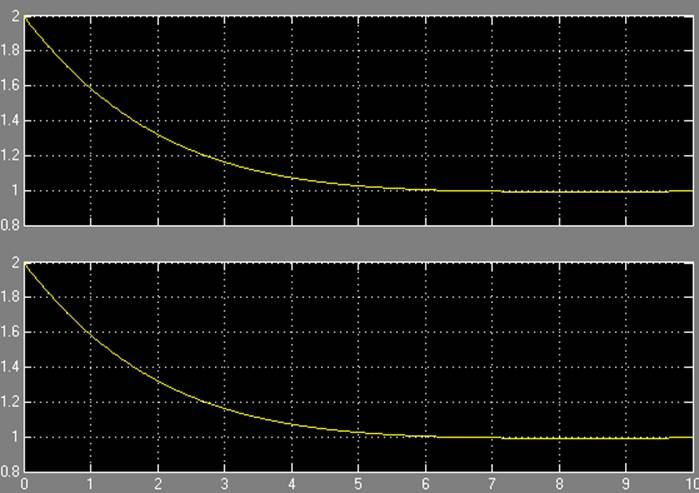
Результаты моделирования при c = 1:
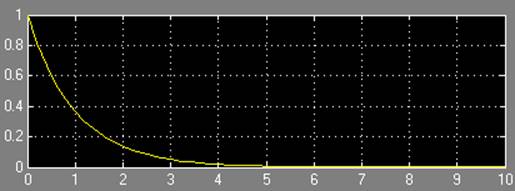
Результаты моделирования при c = 0,1:
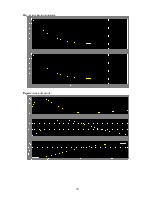
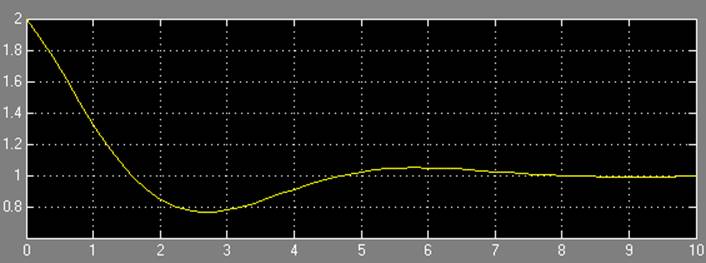
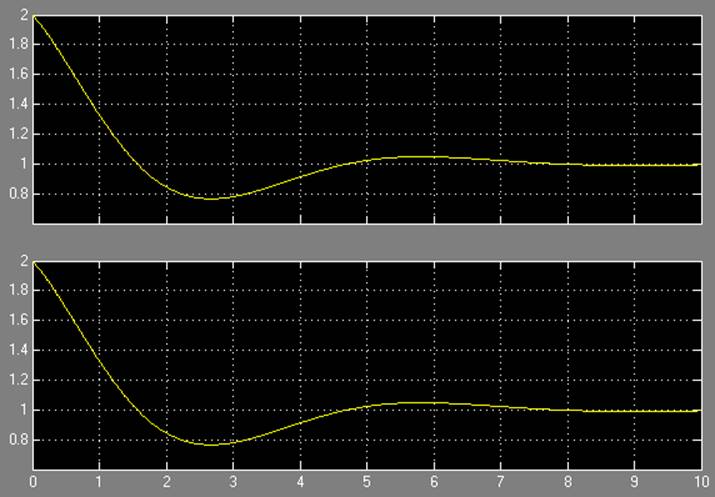
2.2. Моделирование процессов третьего порядка
![]()
![]()
Построенная модель g1:
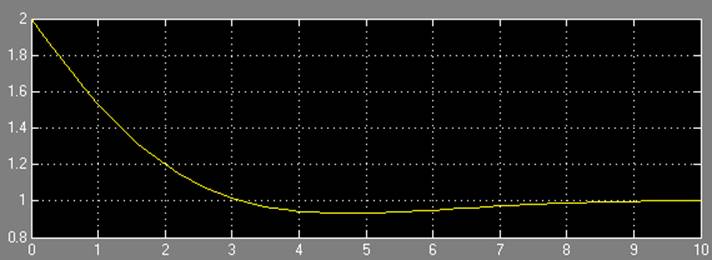
Результаты моделирования:
Результаты моделирования при a = 0,1:
Результаты моделирования при a = 0,5:
Результаты моделирования при b = 0,5:
Результаты моделирования при b = 1:
Результаты моделирования при c = 0,1:
Результаты моделирования при c = 1:
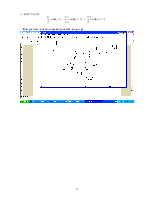
2.3. Линейно-параметрическая модель
Для заданной функции в соответствии с вариантом исходных данных и выбранным многочленом μ(s) получить аналитическое выражение математической модели.
Задана функция μ(s) – непрерывный во времени детерминированный процесс, заданный своим аналитическим выражением. Изображение данного процесса по Лапласу есть:
![]()
Пусть μ(s) – произвольный устойчивый полином третьей степени. Запишем тождество:
![]()
Подставим в изображение по Лапласу заданного процесса числовые значения коэффициентов:
![]()
Выберем полином μ(s) = (s+1)(s+2)(s+3) и перепишем тождество в виде:
![]()
Представим соотношение ![]() в виде:
в виде:
![]()
Тогда:
![]()
![]()
 |
Найдем выражение для σ(t):
>> syms s
>> ilaplace((2*s^2+1.5*s+0.3125)/(s^3+6*s^2+11*s+6))
ans =
13/32*exp(-t)-85/16*exp(-2*t)+221/32*exp(-3*t)
>> pretty(ans)
13 85 221
-- exp(-t) - -- exp(-2 t) + --- exp(-3 t)
32 16 32
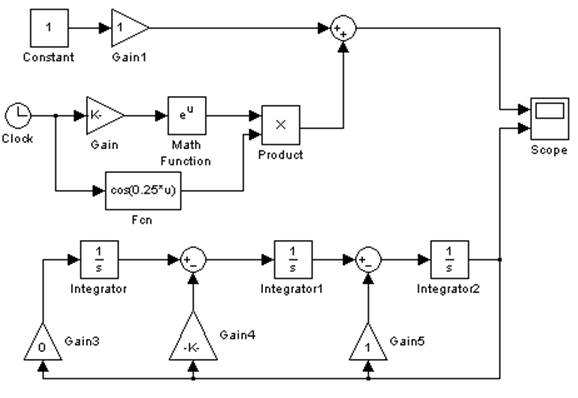
Построенная линейно-параметрическая модель g1:
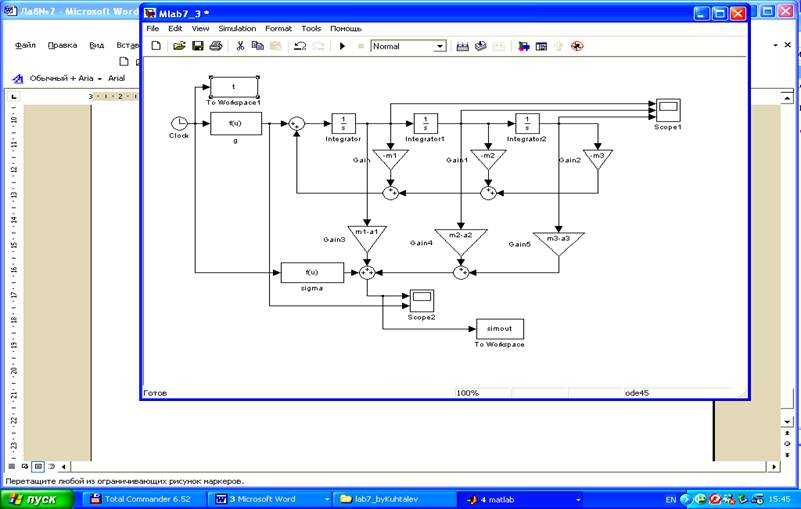
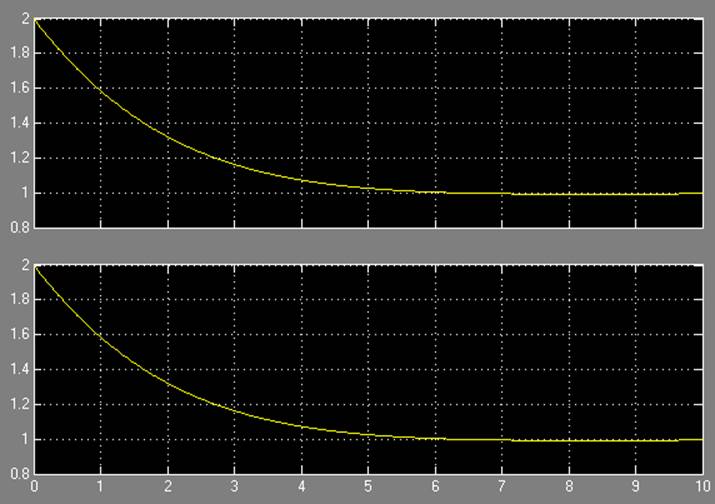
Результаты моделирования:
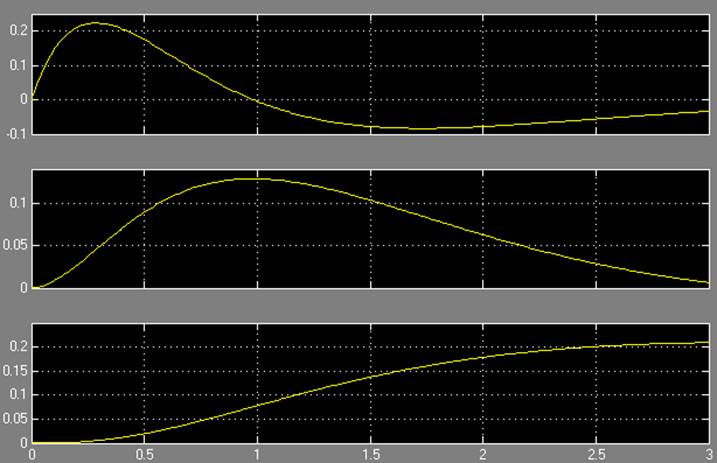
Переменные состояния:
Результаты моделирования при a = 0,5:
Результаты моделирования при b = 1:
Результаты моделирования при c = 1:
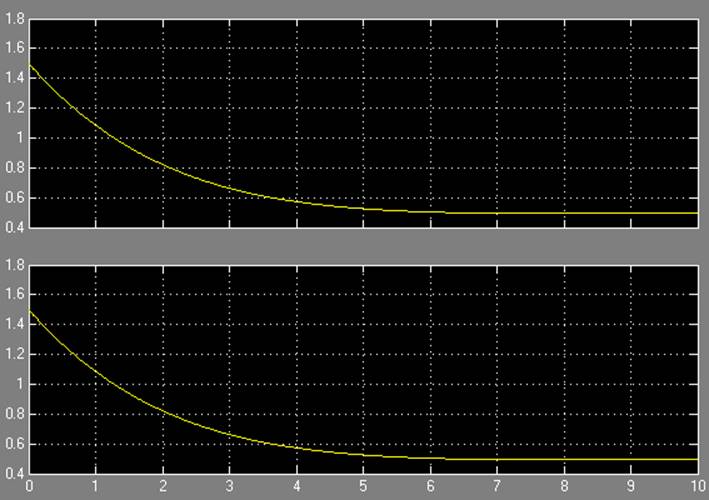
Изменим параметры полинома μ(s): ![]()
m1 = 9, m2 = 23, m3 = 15
Результаты моделирования:
2.4.
Определите, с какого момента времени сигнал выхода модели ![]() совпадает с
линейно-параметрическим представлением исходного процесса. При каких параметрах
многочлена
совпадает с
линейно-параметрическим представлением исходного процесса. При каких параметрах
многочлена ![]() оно будет наименьшим
оно будет наименьшим
Для определения времени, начиная с которого происходит совпадение значений сигнала выхода модели g(t) и линейно-параметрическим представлением исходного процесса, использовался следующий скрипт:
function analyze( simout, tout, g )
delta = 0.001;
time_index = -1;
for(i=length(tout):-1:1)
if((simout(i)-g(i))/simout(i)>=delta)
time_index = i+1;
break;
end;
end;
if(time_index == -1)
time = 0
else
if(time_index > length(tout))
time_index = length(tout);
end;
time = tout(time_index)
end;
return;
|
μ(s) |
μ1 |
μ2 |
μ3 |
t |
|
(s+1)(s+2)(s+3) |
6 |
11 |
6 |
0 |
|
(s+1)(s+3)(s+5) |
9 |
23 |
15 |
1.8931 |
|
(s+2)(s+4)(s+9) |
15 |
62 |
72 |
1.5031 |
|
(s+1)(s+2)(s+20) |
23 |
62 |
40 |
2.1231 |
|
(s+5)(s+6)(s+7) |
18 |
107 |
210 |
2.1931 |
|
(s+2)(s+3)(s+4) |
9 |
26 |
24 |
1.5431 |
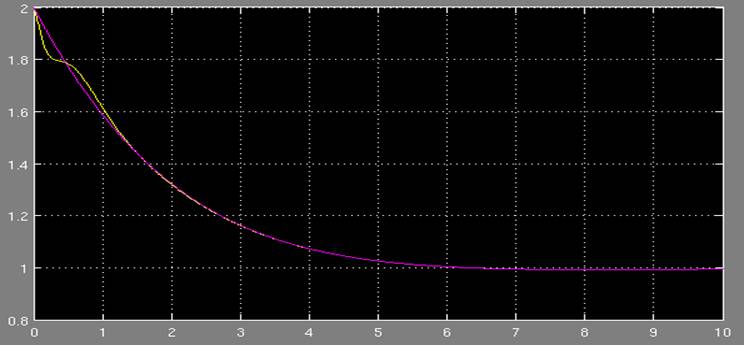 |
μ(s)=(s+1)(s+2)(s+3):
3. Выводы
В результате работы были получены навыки построения моделей заданных процессов. В результате исследования моделей были подтверждены теоретические представления, что говорит о правильности построения модели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.