Параметры переходного процесса замкнутой системы:
tпп=19 c
µ=5
g=90%
J= 46.8152
Как видно, при нулевом значении математического ожидания параметры переходного процесса значительно ухудшаются, однако при этом величина статической ошибки существенно уменьшается. Поэтому для дальнейших экспериментов использовалось данное значение математического ожидания.
Исследование системы при K1≠0, K2≠0
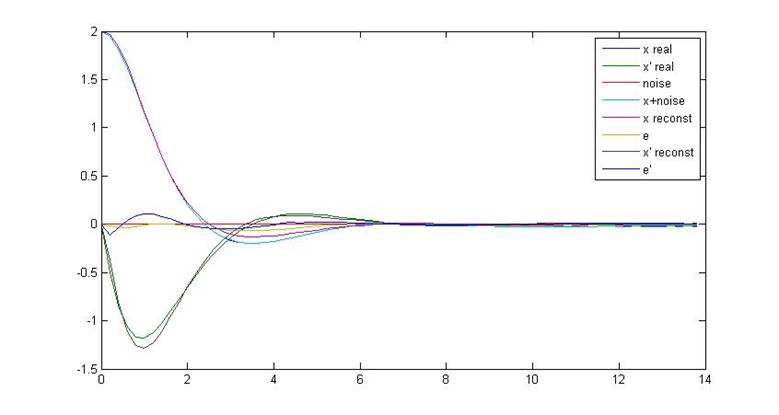
Рис.16. Переходные процессы объекта и наблюдателя
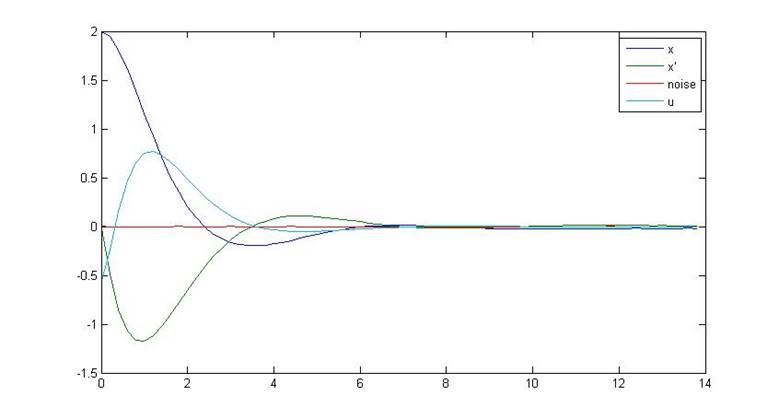
Рис.17. Переходный процесс в замкнутой системе
Параметры переходного процесса замкнутой системы:
tпп=6 c
µ=1
g=20%
J= 34.0263
Исследование системы при K1≠0, K2=0
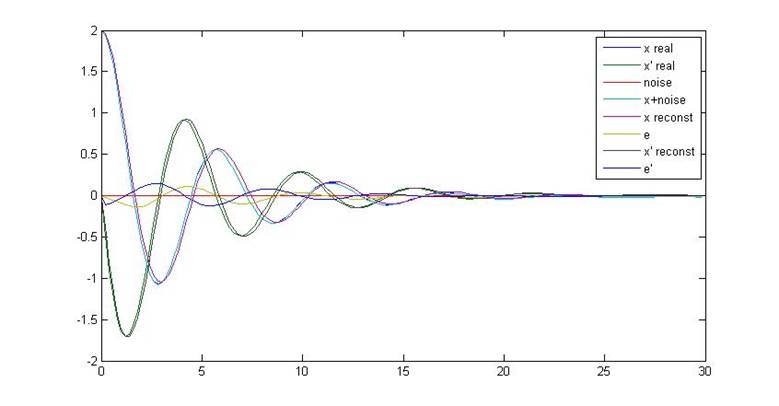
Рис.18. Переходные процессы объекта и наблюдателя
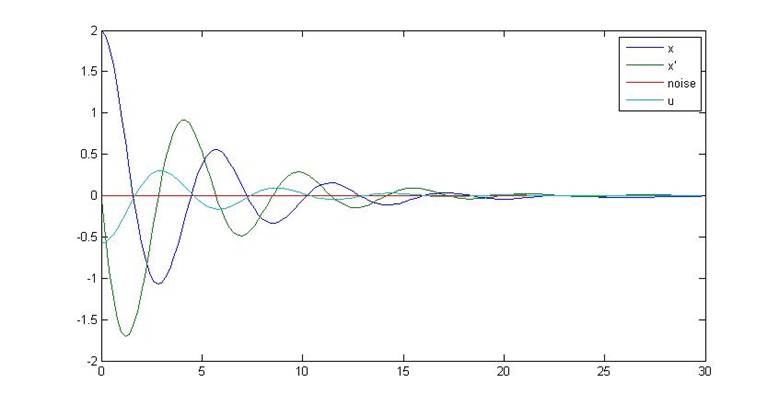
Рис.19. Переходный процесс замкнутой системы
Параметры переходного процесса замкнутой системы:
tпп=22 c
µ=7
g=107%
J= 61.2271
Исследование системы с не полностью измеряемыми координатами.
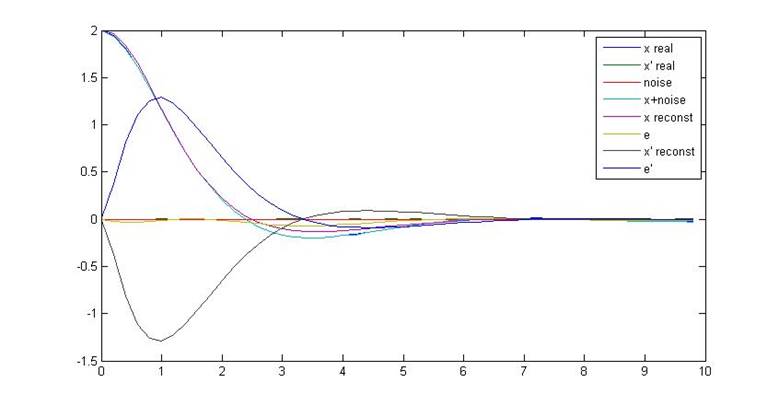
Рис.20. Переходные процессы объекта и наблюдателя

Рис.21. Переходный процесс в замкнутой системе
Параметры переходного процесса замкнутой системы:
tпп=6 c
µ=1
g=20%
J= 34.0218
4.2.2. Исследование системы, подвергающейся воздействию шума.
Исследование системы при K1=K2=0
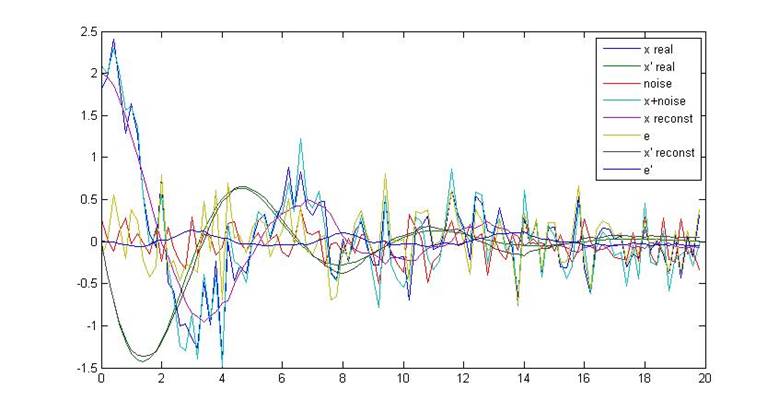
Рис.22. Переходные процессы объекта и наблюдателя
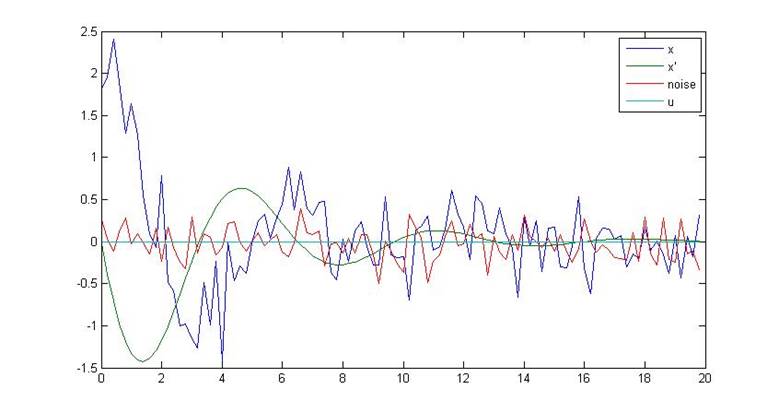
Рис.23. Переходный процесс в замкнутой системе
В данном случае входной сигнал снимался из неверной точки, что оказало влияние на работу системы. На графиках переходных процессов объекта и наблюдателя видно, что наблюдатель справляется с задачей восстановления сигнала, однако с течением времени восстановленный входной сигнал искажается.
В случае верного снятия сигналов, как было показано в лабораторной работе №11, наблюдатель Калмана успешно работает в системе, подверженной влиянию помех.
J= 49.5165
5. Выводы
В ходе проведения данной лабораторной работы были исследованы системы ЛК-управления с наблюдателями Люенбергера и Калмана.
В первой части работы было проведено исследование системы ЛК-управления с наблюдателем Люенбергера. Из полученных зависимостей можно сделать вывод о том, что наблюдатель Люенбергера работает с задержкой относительно непрерывной системы, что можно объяснить проблемами синхронизации непрерывной и дискретной частей комплекса, а также «транспортным» запаздыванием, заключающемся в том, что для вычисления поведения системы на текущем шаге используются данные, полученные на предыдущем шаге.
Из приведенных при выполнении работы графиков видно, что переходные процессы, протекающие в полностью наблюдаемой системе отличаются в лучшую сторону от процессов, имеющих место в не полностью наблюдаемой системе. Об этом свидетельствует как возрастающее значение критерия, так и ухудшающиеся параметры переходного процесса (в частности, время переходного процесса). Следует отметить, что величина перерегулирования при этом уменьшалась, однако это связано с искажением вида переходного процесса.
Выставление одинаковых начальных условий на объекте и в наблюдателе в не полностью наблюдаемой системе позволяет снизить величину запаздывания.
Из исследования квазиоптимальной системы можно сделать вывод, что данная система не является оптимальной, о чем свидетельствуют ухудшающиеся по сравнению с полностью наблюдаемой системой параметры переходного процесса.
Наблюдатель Люенбергера не работает в системах, подверженных воздействию шумов, так как не реализует задачу фильтрацию входного сигнала
Из исследования наблюдателя Калмана, проведенного во второй части работы, можно сделать вывод о том, что в нем, в отличие от наблюдателя Люенбергера, отсутствует запаздывание. Связано это с тем, что в наблюдатель Калмана введено использование прогнозируемых на такт вперед значений координат состояния объекта.
Следует отметить, что значительное ухудшение параметров переходного процесса в системе с наблюдателем Калмана происходит при отклонении параметров системы от оптимальных. Качество переходных процессов, протекающих в не полностью наблюдаемой системе, как можно судить из параметров переходных процессов, практически не отличается от качества процессов в полностью наблюдаемой системе.
В общем случае наблюдатель Калмана позволяет работать в системах, подверженных влиянию шума. Однако в ходе выполнения данной лабораторной работы из-за неправильного снятия входного сигнала зависимости были искажены, что не позволяет делать выводы о работе системы в условиях помех.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.