САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
КАФЕДРА АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
Расчетное задание 3
Дисциплина: Адаптивные системы управления
Работу выполнил студент 5081/2
группа ФИО
Преподаватель
подпись ФИО
Санкт-Петербург
2009г.
Задание
Рассматривается объект, математическая модель которого - линейное дифференциальное уравнение второго порядка:
![]()
Требуется:
Исследовать системы идентификации параметров объекта в разомкнутой и замкнутой системе. Использовать два метода:
- рекуррентный метод наименьших квадратов,
- алгоритм Качмажа.
Теоретические положения
1. Рекуррентный метод наименьших квадратов
Метод имеет в своей основе минимизацию функции:
![]()
Вычисление оценок параметров объекта производятся рекуррентно, т.е. на основании текущих измерений и значений параметров полученных на предыдущем шаге.
![]() -
вектор оценки неизвестных параметров после N-го
измерения.
-
вектор оценки неизвестных параметров после N-го
измерения.
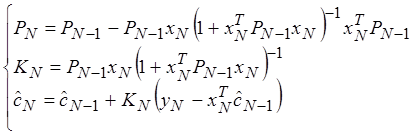
![]()
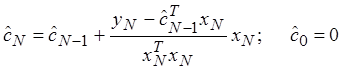
2. Алгоритм Качмажа
Идея метода состоит в решении задачи условной минимизации, когда новая оценка строится на минимальных изменениях старой. Целевая функция:
![]()
Рабочая формула алгоритма:
Исходные данные
a0 = 5 , a1 = ![]() α
= 1, β = 0
α
= 1, β = 0
Получаем следующее уравнение объекта:
![]()
Зададим период дискретизации T = 0.1, будем варьировать количество слагаемых в преобразовании (точность модели), получим переходные характеристики.
>> num = [5];
>> den = [1 sqrt(5)/2 5];
>> sys = tf(num,den)
Transfer function:
5
-----------------s^2 + 1.118 s + 5
>> step(sys)
>> hold on
>> dsys=dsys_config(0.1, 1);
>> step(dsys,10)
>> hold on
>> dsys=dsys_config(0.1, 2);
>> step(dsys,10)
>> hold on
>> dsys=dsys_config(0.1, 3);
>> step(dsys,10)
>> hold on
>> dsys=dsys_config(0.1, 4);
>> step(dsys,10)
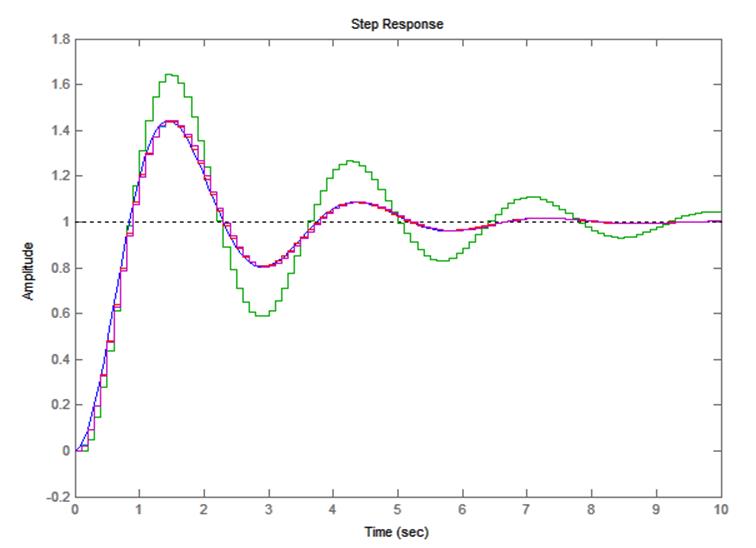
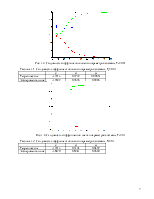
Рис. 1. Вид переходных характеристик при T=0,1, количество слагаемых 1÷4
Для решения обратной задачи перехода от дискретной к непрерывной системе переход от некоторой реализации R(Ф, Г, С) дискретной системы к некоторой реализации R*(A*, B*, H*) непрерывной системы может быть осуществлен с помощью следующих соотношений:
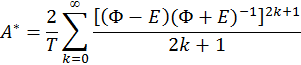
![]()
![]()
Переход к дискретной форме описания:
![]()
![]()
![]()
Модель системы без сигнальных помех:
![]()
![]()

![]()
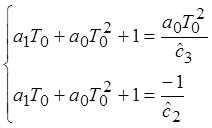
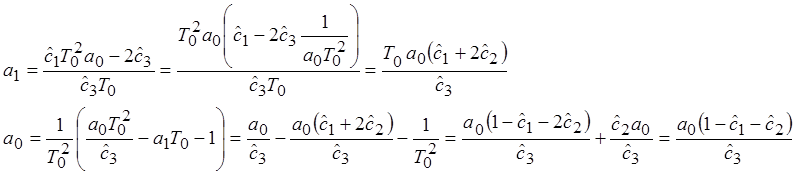
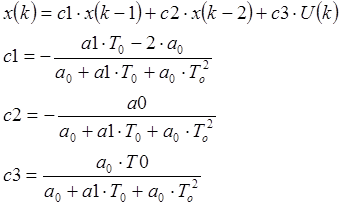
Составим уравнения для обратного преобразования оценочных коэффициентов в параметры системы:

Результаты исследования
1. Рекуррентный метод наименьших квадратов.
Применение метода для разомкнутой системы
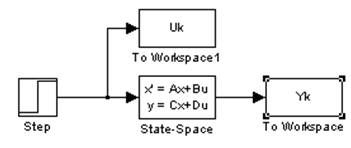
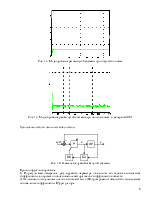
Рис. 1.1. Модель системы в Simulink
r3.1.m
clear
T0 = 0.01;
N = 100;
A = [ 0 1; -5 –sqrt(5)/2 ];
B = [0;2];
for i=1:N
Tk(i) = i*T0;
end
sim('model2',Tk);
for i=1:N
yk(i) = Yk(i);
uk(i) = Uk(i);
Tk(i) = i*T0;
f(:,i)=[0;0;0];
P(:,:,i)=[0 0 0;0 0 0;0 0 0];
Ck(:,i)=[0;0;0];
Gk(:,i)=[0;0;0];
end
Gk(:,2)=[0;0;0];
f(:,3) = [-yk(2); -yk(1); uk(2)];
P(:,:,3) = [10^6 0 0; 0 10^6 0; 0 0 10^6];
for k=3:N
e(k) = yk(k) - f(:,k)'*Ck(:,k-1);
Ck(:,k) = Ck(:,k-1) + Gk(:,k-1)*e(k);
f(:,k+1) = [-yk(k); -yk(k-1); uk(k)];
It = P(:,:,k)*f(:,k+1);
Jt = f(:,k+1)'*P(:,:,k)*f(:,k+1);
Gk(:,k)= It/(Jt+1) ;
P(:,:,k+1) = P(:,:,k)- Gk(:,k)*f(:,k+1)'*P(:,:,k);
end
stairs(Ck(1,:),'r');
hold on
stairs(Ck(2,:),'g');
stairs(Ck(3,:),'b');
hold off
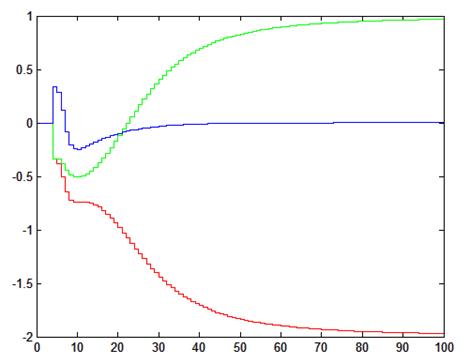
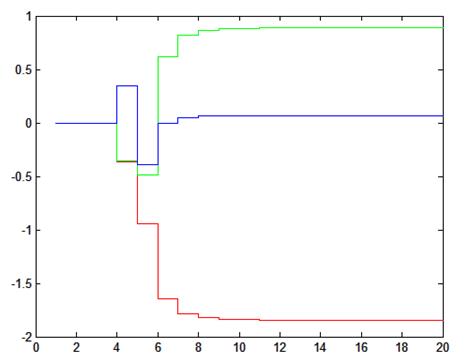
Рис. 1.2. Сходимость коэффициентов оценки параметров системы, Т0=0,01
Таблица 1.1. Сходимость коэффициентов оценки параметров системы, Т0=0,01
|
с1 |
с2 |
с3 |
|
|
Теоретические |
-1,9913 |
0,9722 |
0,00051 |
|
Экспериментальные |
-1,9692 |
0,9696 |
0,0006 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.