|
a0 |
0.5 |
5 |
50 |
|
К1 |
0.4142 |
0.4142 |
0.4142 |
|
К2 |
0.3440 |
0.2408 |
0.1083 |
2. Исследование зависимости значения функционала от коэффициентов K1 и K2
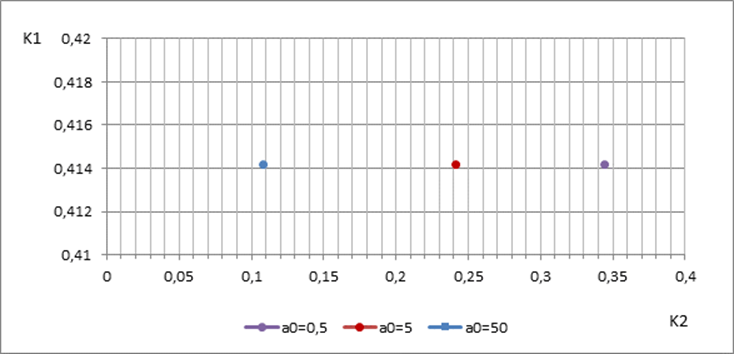 Рис. 2.1. Пары коэффициентов K1 и K2
для различных значений a0
Рис. 2.1. Пары коэффициентов K1 и K2
для различных значений a0
Построим линии равного уровня для критерия J в плоскости K1, K2.
ДУ 2-го порядка, описывающее поведение функционала для объекта:
r1_3_du.m
function dxj = r1_3_du(t, xj) %функция формирования ДУ
dxj = zeros(5,1);
a0 = 5;
A = [0 1; -a0 -sqrt(5)/2];
B = [0; a0];
K1 = xj(4);
K2 = xj(5);
dxj(4) = 0;
dxj(5) = 0;
U= -[K1 K2]*xj(1:2);
dxj(1:2) = A*xj(1:2)+B*U;
dxj(3)=xj(1)^2+U^2;
Основной скрипт:
r1_3.m
[K1,K2] = meshgrid(0:.1:5);
J=zeros(length(K1),length(K2));
tspan = [0 10]; % время интегрирования
X0=[1; 0]; % начальные условия
Jn=0; % начальное значение критерия = 0
for m=1:length(K1)
for n=1:length(K2)
[t,XJ] = ode45( @r1_3_du, tspan, [X0 ; Jn; K1(1,m); K2(n,1)]);
J(m,n)=max(XJ(:,3));
end
end
mesh(K1,K2,J)
Линии равного качества строятся с помощью команды contour(K1,K2,J).
a = 5:

Рис. 2.2. Зависимость значения функционала от коэффициентов K1 и K2, а0 = 5
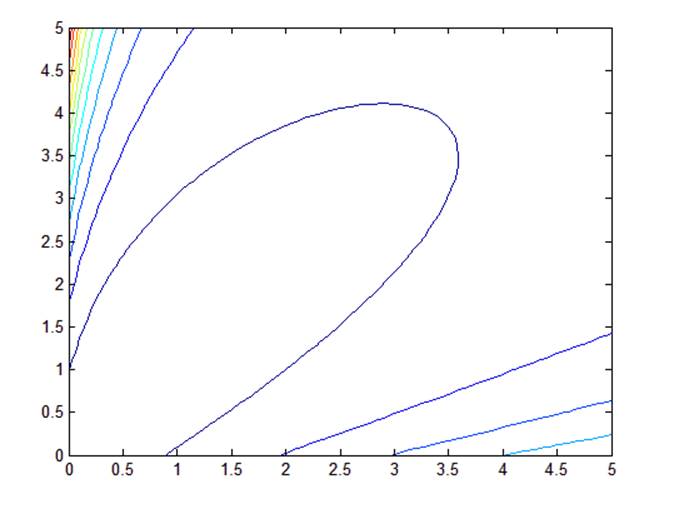
Рис. 2.3. Линии равного качества при а0 = 5
a0 = 0.5:
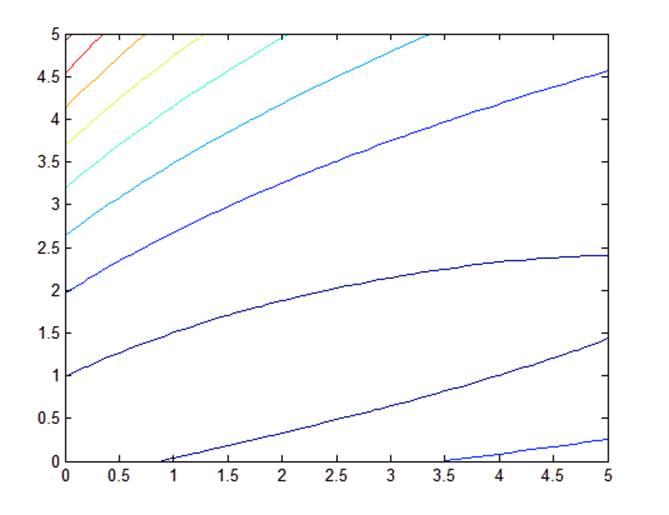
Рис. 2.4. Линии равного качества при а0 = 0,5
a0 = 50:
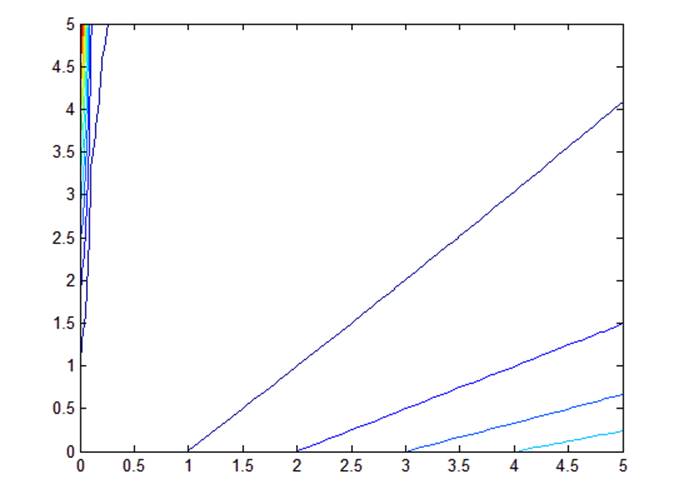
Рис. 2.5. Линии равного качества при а0 = 50
3. Исследование изменения прямых показателей качества при фиксированном значении функционала, но различных параметрах регулятора.
Рассматриваются номинальные параметры, a0 = 5.
Из полученных линий равного качества выберем одну, в нашем случае J = 1.1. Для нее выберем несколько пар оптимальных коэффициентов (K1, K2), при которых реализуется данное значение функционала:
(3.4, 1.1), (4.8, 3), (3.4, 4.4), (1.7, 3) – рис. 3.1.
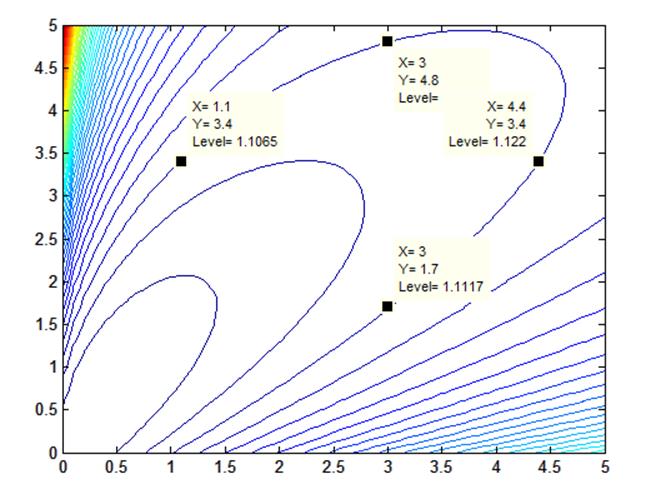
Рис. 3.1. Значения оптимальных коэффициентов для J = 1.1
Построим переходные процессы для данных коэффициентов.
Оптимальные коэффициенты для нашего случая: K1=0.4142 ; K2=0.2408
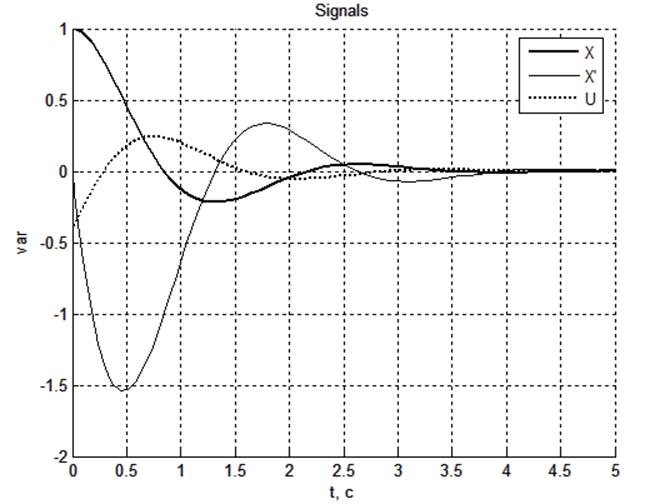
Рис. 3.2. Графики
зависимостей ![]() и
и![]() при
a0 = 5 и оптимальных K1, K2
при
a0 = 5 и оптимальных K1, K2
Время переходного процесса: 2.6 с
Перерегулирование: 0.22

Рис. 3.3. Графики
зависимостей ![]() и
и![]() при
a0 = 5; K1 = 3.4, K2 = 1.1
при
a0 = 5; K1 = 3.4, K2 = 1.1
Время переходного процесса (оценка быстродействия): 0.95 с
Перерегулирование: 0.045

Рис. 3.4. Графики
зависимостей ![]() и
и![]() при
a0 = 5; K1 = 4.8, K2 = 3
при
a0 = 5; K1 = 4.8, K2 = 3
Время переходного процесса (оценка быстродействия): 1.55 с
Перерегулирование: 0

Рис. 3.5. Графики
зависимостей ![]() и
и![]() при
a0 = 5; K1 = 3.4, K2 = 4.4
при
a0 = 5; K1 = 3.4, K2 = 4.4
Время переходного процесса (оценка быстродействия): 3.05 с
Перерегулирование: 0
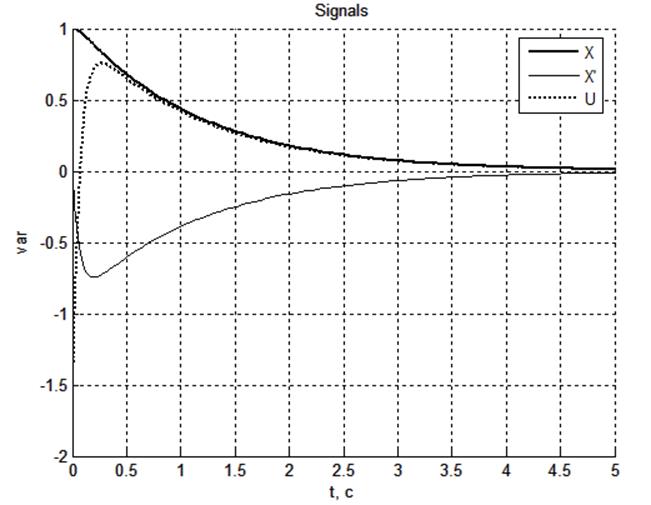
Рис. 3.6. Графики
зависимостей ![]() и
и![]() при
a0 = 5; K1 = 1.7, K2 = 3
при
a0 = 5; K1 = 1.7, K2 = 3
Время переходного процесса (оценка быстродействия): 3.45 с
Перерегулирование: 0
Видим, что при сохранении значения косвенного показателя качества, т.е. функционала J в нашем случае, имеем изменения прямых показателей. Причем характер процесса может также изменяться, от периодического процесса для первой пары коэффициентов до апериодического для остальных.
4. Синтез и исследование дискретной оптимальной системы.
Объект описывается векторно-матричным уравнением вида:
![]()
Где
Критерий оптимальности дискретной системы управления:
![]()
Принимаем R
= 1, а матрица Q при ![]() ,
,![]() равна
равна ![]() .
.
Исследование влияния дискретизации формирования управляющего сигнала на значение оптимальных коэффициентов.
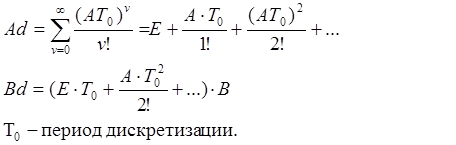
Расчет параметров дискретной системы.
r1_5.m
T0 = [0.001 0.005 0.01 0.05 0.1 0.5 1];
a0 = 5;
A = [0 1; -a0 -sqrt(5)/2];
B = [0; a0];
E = [1 0;0 1];
for i=1:length(T0)
Ad = 0;
Bd = E*T0(i);
for n=1:1:20
Ad=Ad+A^n*T0(i)^n/factorial(n);
Bd=Bd+A^n*T0(i)^(n+1)/factorial(n+1);
end
T0(i)
Ad = E + Ad
Bd = Bd*B
end
Таблица 4.1. Параметрические матрицы объекта при различном периоде дискретизации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.