Министерство высшего и среднего профессионального образования РФ.
Санкт-Петербургский Государственный Технологический
Университет Растительных Полимеров.
Кафедра автоматизированного электропривода и электротехники.
КУРСОВАЯ РАБОТА
ПО КУРСУ <ТАУ>.
Исследование системы автоматического
управления.
Выполнил студент группы 533 Проверил
. доцент
Санкт-Петербург
2003.
Задача курсовой работы.
Рассчитать оптимальные настройки регулятора в непрерывном варианте управления в зависимости от параметров объекта, сравнить качественные показатели переходных процессов САУ.
Выбрать систему с наилучшими показателями качества переходного процесса.
Исходные данные для выполнения курсовой работы.
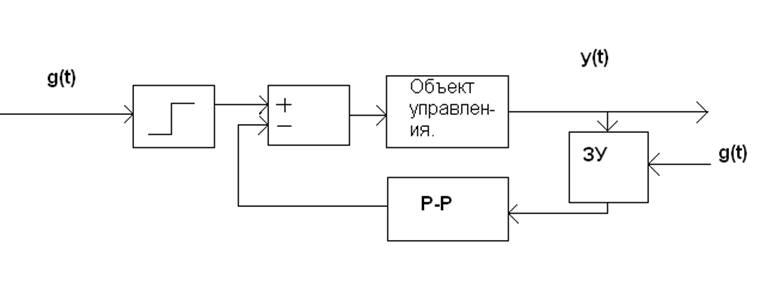
а) Система автоматического управления.
б) Уравнение объекта: a1dxвых/dt+ a2xвых=bxвх;
в) Значение Тоб, τоб, Коб.
Тоб - постоянная времени объекта;
Коб – коэффициентусиленияобъекта;
Τоб – запаздывание объекта;
х(t) – возмущающее воздействие;
y(t) – выходной параметр;
g(t) – задание;
р-р – регулятор;
|
Tоб, с |
τоб,с |
коб |
|
100 |
50 |
8 |
Исследование объекта управления.
1.1 Вывод дифференциального уравнения объекта.
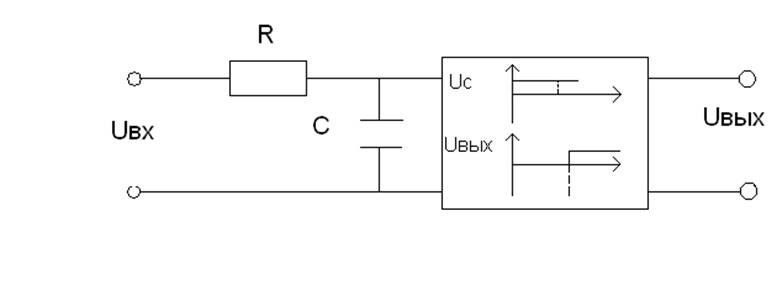
Рис.1. Схема исследуемого объекта.
Uвх=IR+Uc; i=cdUc/dt
Uвх=RCdUc/dt+Uc;
TdUc/dt+Uc=KUвх Uвх, где T=RC, K=1.
С учетом запаздывания τ уравнение объекта:
TdUвых/dt+Uвых=KUвх(t-τ).
Значение T=RC, τ, Kзадаются преподавателем.
Исследование объекта и САУ на ЭВМ.
Вывод передаточной функции объекта.
a1dxвых/dt+ a2xвых=bxвх;
a1/a2*dxвых/dt+xвых=b/a2xвх;
Tоб=a1/a2, Kоб= b/a2,
Tоб*dxвых/dt+xвых= Kобxвх;
TобPxвых(P)+Xвых(P)=Kобxвх(P);
xвых(P)/xвх(P)[TобP+1]=Kоб;
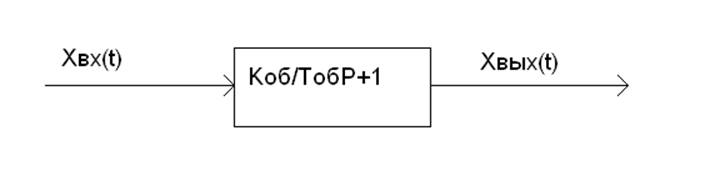
W(P)об=Kоб/TобP+1;
W(P)об=0.8/0.002P+1;
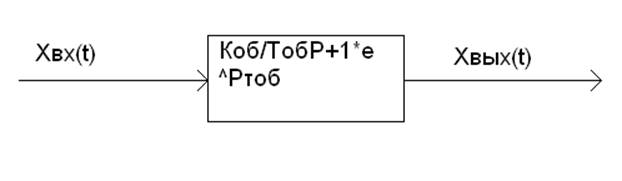
Cучетом запаздывания:
W(P)об=0.8/0.002P+1*e^-0,1Pоб;
Вывод амплитудно-фазовой, амплитудно-частотной, фазо-частотной и логарифмической характеристики объекта.
τоб=0;
Амплитудно-фазовая характеристика:
W(jω)=Kоб/√Tоб^2+ω^2+1*e^-arctgTобω;
W(jω)=0.8/√0.000004ω^2+1*e^-arctg0.002ω;
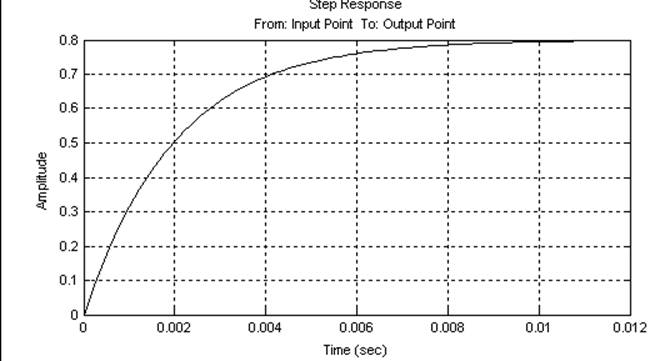
Амплитудно-частотная характеристика:
A(ω)=Kоб/√Tоб^2ω^2+1;
A(ω)=0.8/√0.000004ω^2+1;
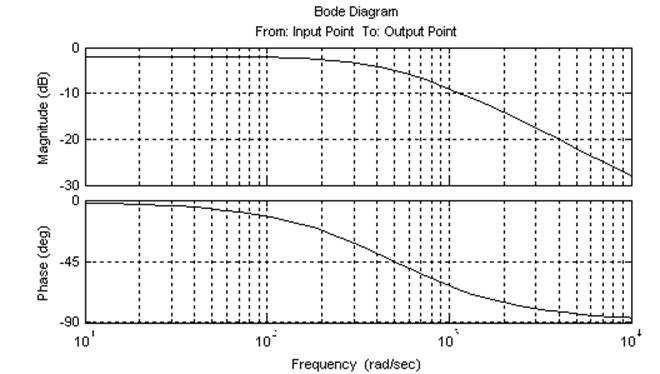
Фазо-частотноя характеристика:
φ(ω)=-arctgTобω;
φ(ω)=-arctg0.002ω;
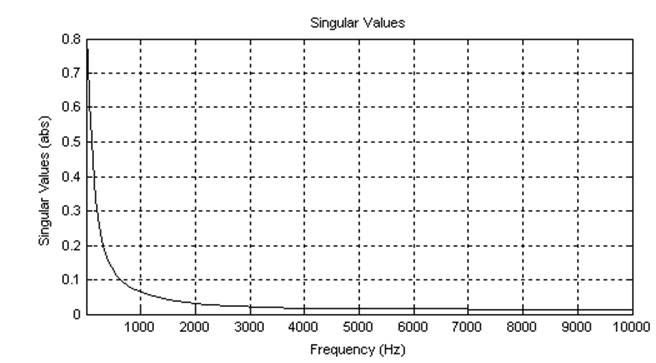
Логарифмическая характеристика:
L(ω)=20lg-20lg√Tоб^2+ω^2+1;
L(ω)=20lg-20lg√0.000004ω^2+1;
τоб≠0
Амплитудно-фазовая характеристика:
W(jω)=Kоб/√Tоб^2+ω^2+1*e^-arctgTобω-τобω;
W(jω)=0.8/√0.000004ω^2+1*e^-arctg0.002ω-0.1ω;
Амплитудно-частотная характеристика:
A(ω)=Kоб/√Tоб^2ω^2+1;
A(ω)=0.8/√0.000004ω^2+1;
Фазо-частотноя характеристика:
φ(ω)=-arctgTобω-τобω;
φ(ω)=-arctg0.002ω-0.1ω;
Логарифмическая характеристика:
L(ω)=20lg-20lg√Tоб^2+ω^2+1;
L(ω)=20lg-20lg√0.000004ω^2+1;
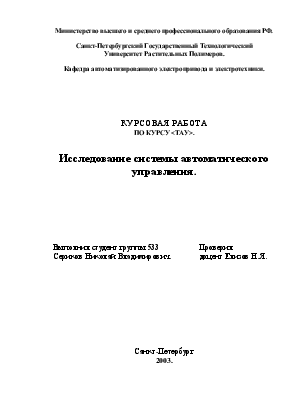
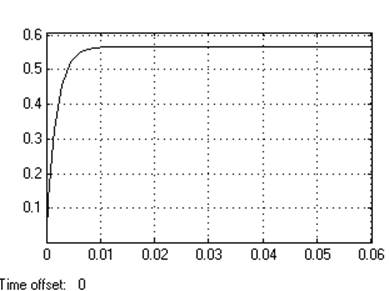
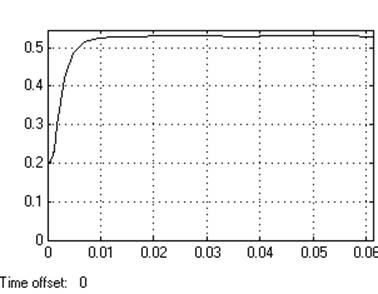
Переходная характеристика объекта:
Xвых(t)=Kоб(1-et^Tоб); Xвых(t)=0.8(1-et^0.002);
В результате исследования объекта были получены следующие зависимости:
1. Переходная характеристика.
|
|
2. Амплитудная характеристика:
|
|
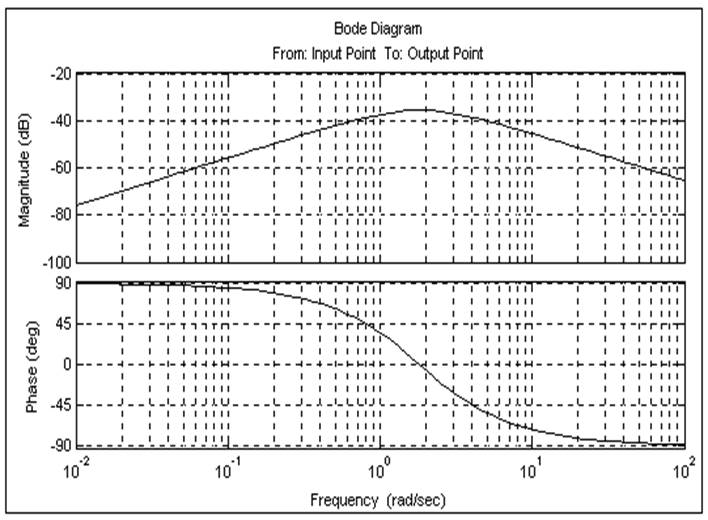
3. Логарифмическая характеристика:
|
|
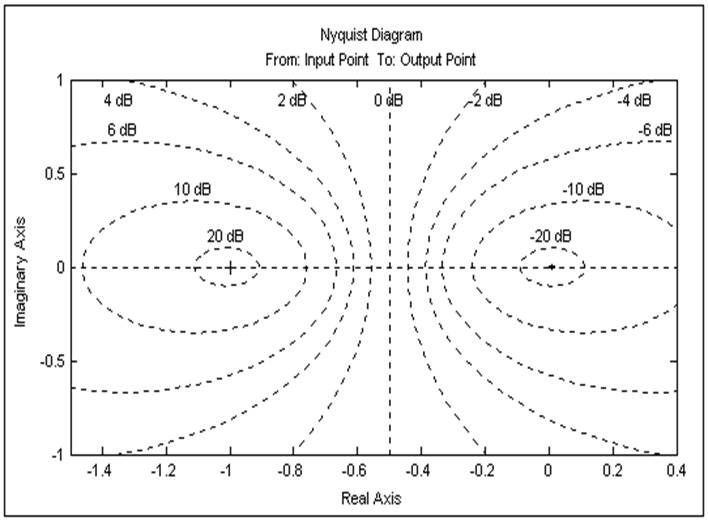
4. Амплитудно-фазовая характеристика.
|
|
Исследование объекта управления.
Структурная схема объекта:
τоб=0
τоб≠0
При моделировании объекта на ЭВМ необходимо определить:
1. Переходную характеристику при τоб=0 и при τоб≠0.
2. АФХ, ЛФХ, ЛАХ.
3. Определить Тоб, τоб и Коб и сравнить с заданным.
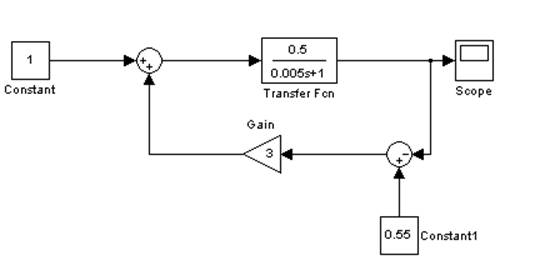
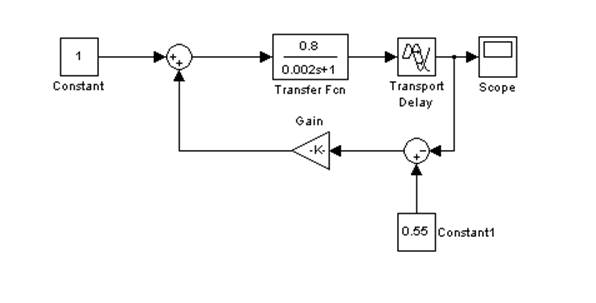
1. Исследование П-регулятора.
1.1. Объект имеет нулевое запаздывание: τ=0[с].
|
|
Рис. 1. Схема системы регулирования с П-регулятором и объектом регулирования, которому соответствует запаздывание τ=0[с].
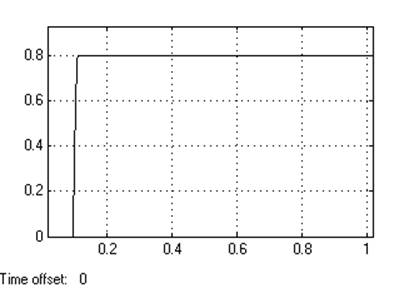
Переходные процессы САУ.
 Кр=0.5
Кр=0.5
Динамическое отклонение…нет.
Статическое отклонение...≈7.2℅
Время регулирования …0.01[c].
Динамический коэффициент регулирования………………0.51
Перерегулирование………….нет
Устойчивость………………….да
Кр=5
Динамическое отклонение…нет.
Статическое отклонение...≈3,6℅
Время регулирования …0.01[c].
Динамический коэффициент регулирования………………0,53
Перерегулирование………….нет
Устойчивость…………………да
Кр=20
Динамическое отклонение…нет.
Статическое отклонение...≈1,8℅
Время регулирования …0.013[c].
Динамический коэффициент регулирования………………0,54
Перерегулирование………….нет
Устойчивость…………………да
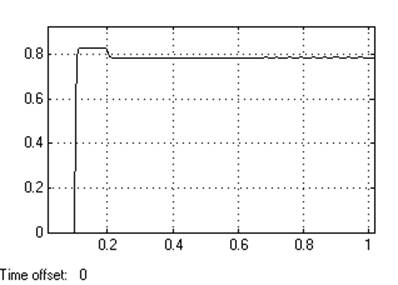
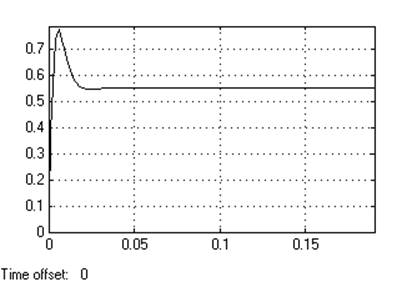
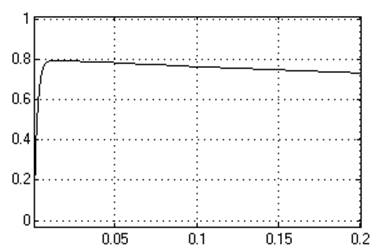
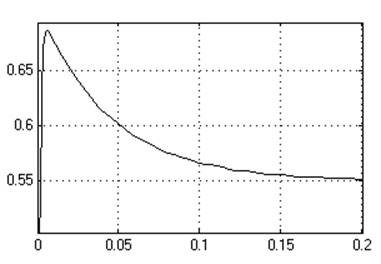
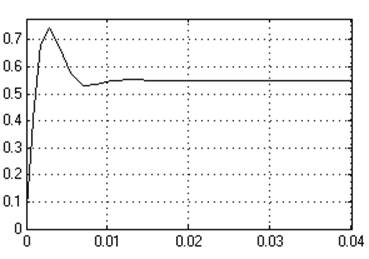
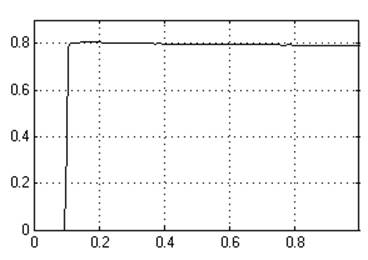
1.2. Объект имеет запаздывание τ=0,1[c].
Переходные процессы САУ.
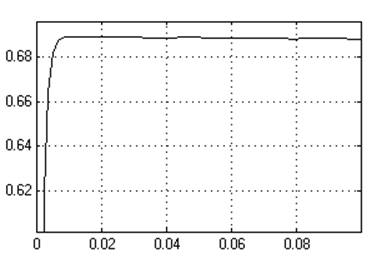
Кр=0,001
Динамическое отклонение…нет.
Статическое отклонение...≈9,1℅
Время регулирования …0.09[c].
Динамический коэффициент регулирования……………….0,5
Перерегулирование…………нет
Устойчивость…………………да
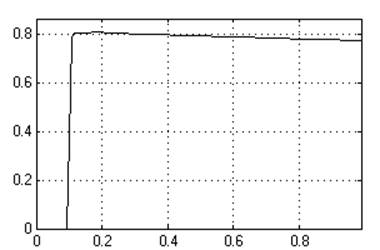
 Кр=0,07
Кр=0,07
Динамическое отклонение…нет.
Статическое отклонение...≈1,8℅
Время регулирования …0.023[c].
Динамический коэффициент регулирования………………0,54
Перерегулирование………….нет
Устойчивость…………………да
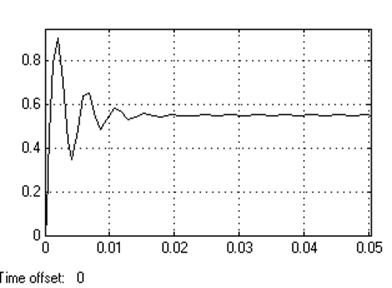
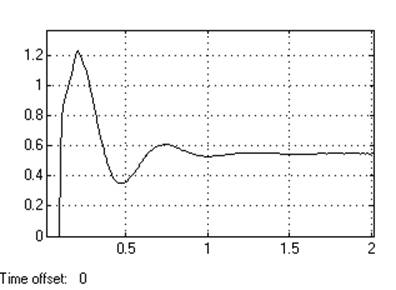
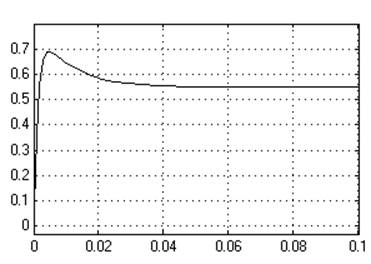
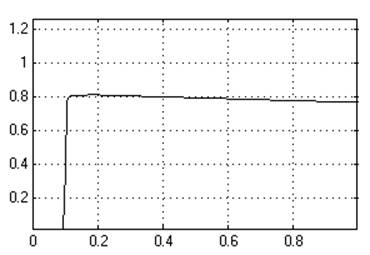
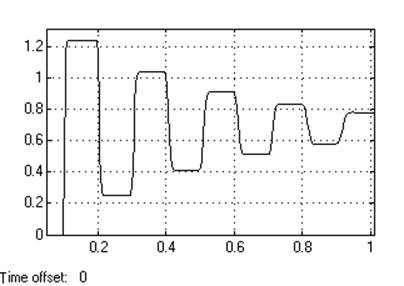 Кр=1
Кр=1
Динамическое отклонение…0,26.
Статическое отклонение.......≈3℅
Время регулирования …...0.87[c].
Динамический коэффициент регулирования……………….0,78
Перерегулирование………….50℅
Устойчивость…………………..да
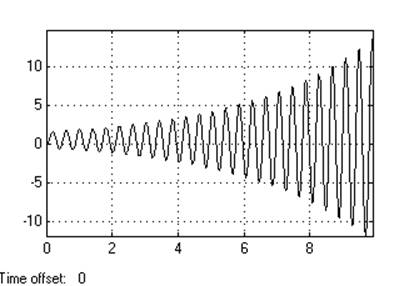
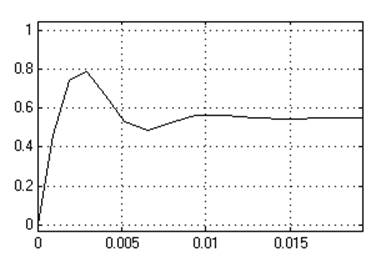
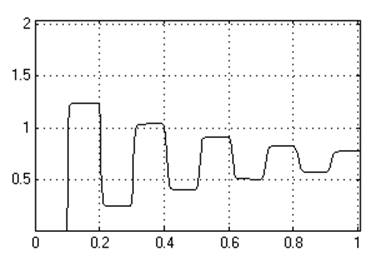
Кр=2
Динамическое отклонение…???.
Статическое отклонение.......???.
Время регулирования …...+∞[c].
Динамический коэффициент регулирования………………???
Перерегулирование………100℅
Устойчивость……….граничная
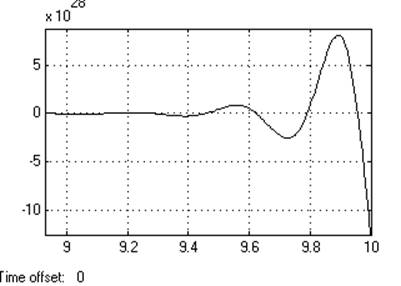
Кр=3
Динамическое отклонение…---.
Статическое отклонение.......---.
Время регулирования ……...---.
Динамический коэффициент регулирования………………---.
Перерегулирование…….>100℅
Устойчивость…………… нет.
2. Исследование И-регулятора.
2.1.Объект имеет запаздывание τ=0[c].
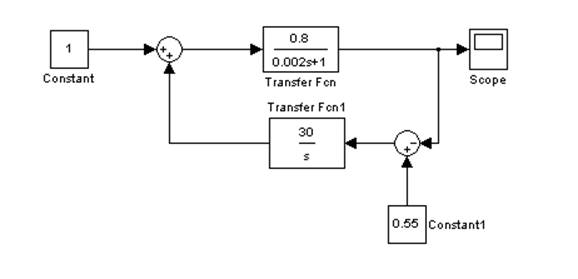
Рис. 3. Схема системы регулирования с И-регулятором и объектом регулирования, которому соответствует запаздывание τ=0[c].
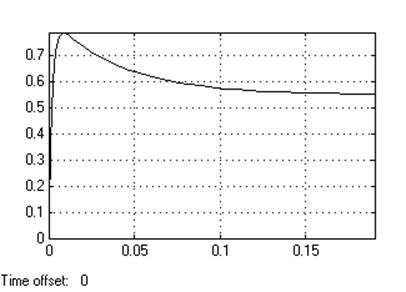
Кр=30
Динамическое отклонение….нет.
Статическое отклонение…..≈0℅.
Время регулирования………0.17.
Динамический коэффициент регулирования……………....0.55.
Перерегулирование………….нет.
Устойчивость…………………да.
 Кр=235
Кр=235
Динамическое отклонение….0.11
Статическое отклонение…...≈0℅.
Время регулирования……0.03[c].
Динамический коэффициент регулирования……………….0.66.
Перерегулирование…………..8℅.
Устойчивость………………….да.
=350
Динамическое отклонение….0.13
Статическое отклонение…...≈0℅.
Время регулирования……0.025[c].
Динамический коэффициент регулирования……………….0.68.
Перерегулирование………….12℅.
Устойчивость…………………..да.
Кр=5000
Динамическое отклонение….0.35
Статическое отклонение…...≈0℅.
Время регулирования……0.02[c].
Динамический коэффициент регулирования……………….0.09.
Перерегулирование………….70℅.
Устойчивость………………….да.
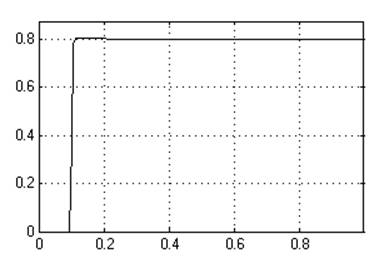
2.2. Объект имеет запаздывание: τ=0,1[c].
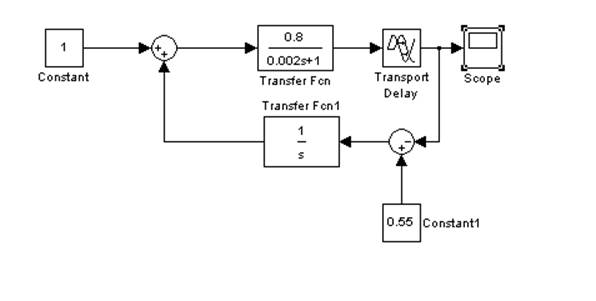
Рис. 4. Схема системы регулирования с И-регулятором и объектом регулирования, которому соответствует запаздывание τ=0,1[c].
Процессы автоматической системы.
Кр=1
Динамическое отклонение….нет
Статическое отклонение…...≈0℅.
Время регулирования……2,00[c].
Динамический коэффициент регулирования……………….0.55.
Перерегулирование………….нет.
Устойчивость………………….да.
Кр=10
Динамическое отклонение….0.14
Статическое отклонение…...≈0℅.
Время регулирования……..1,25[c].
Динамический коэффициент регулирования……………….0.79.
Перерегулирование………….10℅.
Устойчивость………………….да.
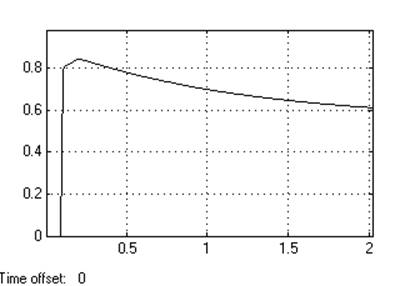
Кр=20
Динамическое отклонение….0.55
Статическое отклонение…...≈0℅.
Время регулирования……….+∞[c].
Динамический коэффициент регулирования………………..1.1.
Перерегулирование………….60℅.
Устойчивость………………….да.
Динамическое отклонение….<?>
Статическое отклонение….....<?>
Время регулирования……..+∞[c].
Динамический коэффициент регулирования………………..<?>
Перерегулирование………..100℅.
Устойчивость…………граничная.
Кр=50
Динамическое отклонение….---.
Статическое отклонение…....---.
Время регулирования……….---.
Динамический коэффициент регулирования……………….---.
Перерегулирование…… >100℅.
Устойчивость……………….нет.
3. Исследование ПИ-регулятора.
3.1. Объект имеет запаздывание τ=0[c].
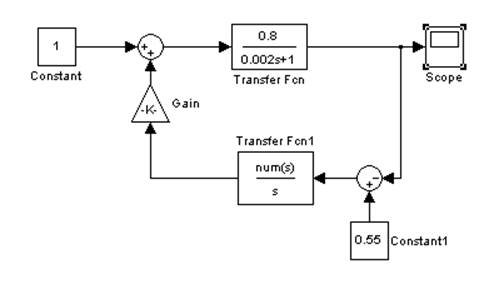
Рис. 5. Схема системы регулирования с ПИ-регулятором и объектом регулирования, которому соответствует запаздыванию τ=0[c].
Переходные процессы автоматической системы.
Примечание:
1) Путем увеличения параметра усилительного звена можно увеличить коэффициент усиления изодромного звена (Кр) и наоборот.
2) Путем увеличения числа перед оператором (S) в числителе выражения, характеризующего второе звено, можно увеличить время изодрома (Ти) и наоборот.
3) Величина (К1) характеризует пропорциональную состовляющую изодромного звена.
К1=0,01
 Кр=200
Кр=200
Ти=0,00005
Динамическое отклонение….0,09.
Статическое отклонение…....≈0℅.
Время регулирования……0,2[c].
Динамический коэффициент регулирования………………./0.64.
Перерегулирование………… 10℅.
Устойчивость…………………..да.
К1=1
 Кр=200
Кр=200
Ти=0,005
Динамическое отклонение….0,05.
Статическое отклонение…....≈0℅.
Время регулирования……….0,45.
Динамический коэффициент
регулирования………………...0,6.
Перерегулирование………….. 0℅.
Устойчивость…………………..да
 К1=1
К1=1
Кр=50
Ти=0,05[c]
Динамическое отклонение….нет.
Статическое отклонение…...≈0℅.
Время регулирования…....0,017[c].
Динамический коэффициент регулирования………………0.55.
Перерегулирование………… нет.
Устойчивость…………………да.
К1=1
 Кр=0,1
Кр=0,1
Ти=10[c]
Динамическое отклонение….нет.
Статическое отклонение…...≈0℅.
Время регулирования……....>0.1
Динамический коэффициент регулирования……………….0,55.
Перерегулирование…………. нет.
Устойчивость…………………...да.
К1=1
Кр=50
Ти=0,02[c]
Динамическое отклонение….нет.
Статическое отклонение…...≈0℅.
Время регулирования…….0,02[c].
Динамический коэффициент регулирования……………….0,55.
Перерегулирование…………. нет.
Устойчивость…………………..да.
 К1=1
К1=1
Кр=1500
Ти=0,000667
Динамическое отклонение….0,19.
Статическое отклонение…....≈0℅.
Время регулирования……0,015[c].
Динамический коэффициент регулирования………………0.74.
Перерегулирование……….. 40℅.
Устойчивость…………………да.
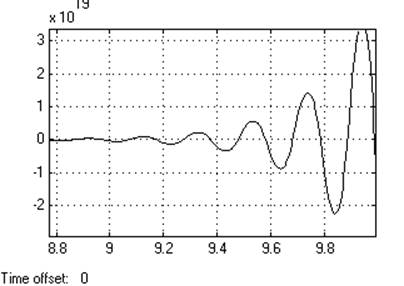
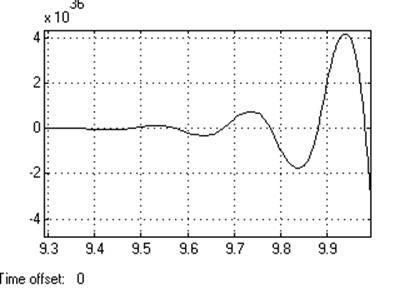
3.2. Объект имеет запаздывание τ=0,1[c].
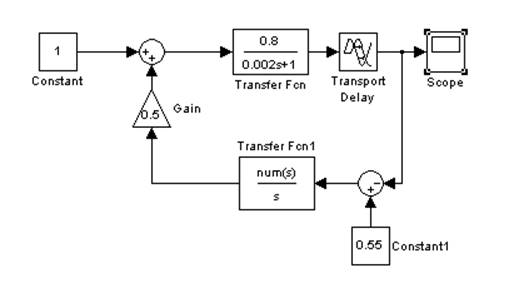
Рис. 6. Схема системы регулирование с ПИ-регулятором и объектом регулирования, которому соответствует запаздывание τ=0,1[c].
Путем изменения различным образом, параметров звеньев в цепи обратной связи, были получены следующие графические зависимости.
К1=0,007
Кр=0,5
Ти=0,014
Динамическое отклонение…..нет.
Статическое отклонение…....≈0℅.
Время регулирования………0,22[c].
Динамический коэффициент регулирования………………0.55.
Перерегулирование…………..нет.
Устойчивость…………………да
=0,007
Кр=1,8
Ти=0,00389
Динамическое отклонение….0,01.
Статическое отклонение…....≈0℅.
Время регулирования……0,1[c].
Динамический коэффициент регулирования………………0.56.
Перерегулирование………..…нет.
Устойчивость…………………..да
К1=0,007
Кр=10
Ти=0,0007
Динамическое отклонение….0,24.
Статическое отклонение…....≈0℅.
Время регулирования………..0,21[c].
Динамический коэффициент регулирования……………….0.79.
Перерегулирование……….. …7℅.
Устойчивость…………………да
К1=0,007
Кр=30
Ти=0,0002333
Динамическое отклонение…<?>.
Статическое отклонение…...<?>.
Время регулирования…….0,93[c].
Динамический коэффициент регулирования………………<?>.
Перерегулирование……….100℅.
Устойчивость…………граничная.
 К1=0,007
К1=0,007
Кр=40
Ти=0,000175
Динамическое отклонение….----.
Статическое отклонение…....----.
Время регулирования……….0,88.
Динамический коэффициент регулирования……………….----.
Перерегулирование………..>100℅.
Устойчивость…………………нет
 К1=0,0007
К1=0,0007
Кр=0,07
Ти=0,01[c]
Динамическое отклонение…..нет.
Статическое отклонение…....≈0℅.
Время регулирования………0,92[c].
Динамический коэффициент регулирования………………0.55.
Перерегулирование…………..нет.
Устойчивость…………………..да
К1=1
Кр=0,07
Ти=14,285714
Динамическое отклонение….0,23.
Статическое отклонение…....≈0℅.
Время регулирования………+∞ [c].
Динамический коэффициент регулирования………………..0.78.
Перерегулирование…………. 40℅.
 Устойчивость……………………да
Устойчивость……………………да
К1=2,0101
Кр=0,07
Ти=28.71571429
Динамическое отклонение…<?>.
Статическое отклонение…...<?>.
Время регулирования…….+∞[c].
Динамический коэффициент регулирования………………<?>.
Перерегулирование……….100℅.
Устойчивость…………граничная.
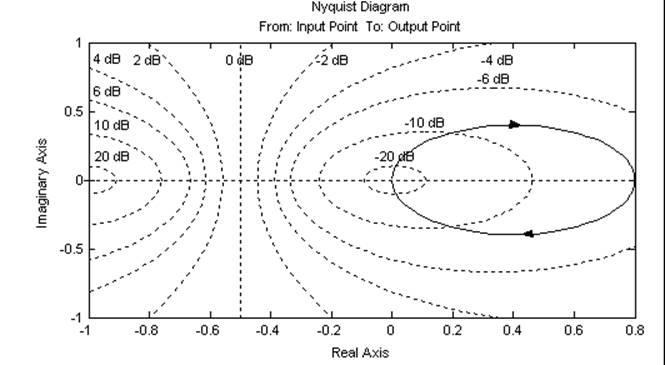
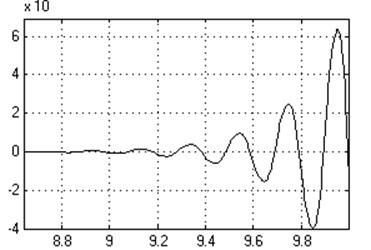
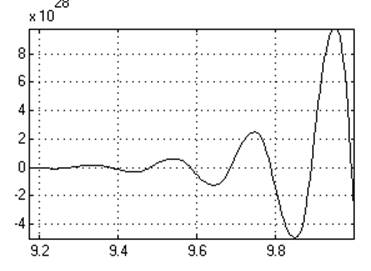
Характеристики замкнутой САУ:
![]()


![]()
Логарифмическая фазовая(ЛФХ)и амплитудная характеристики(ЛАХ):
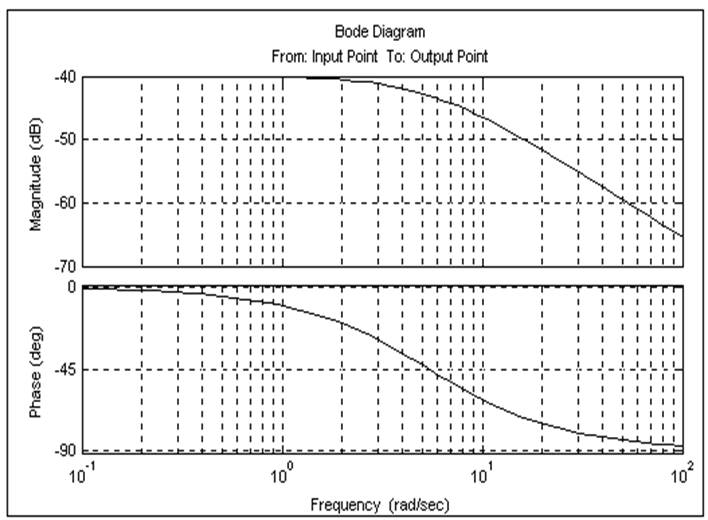 |
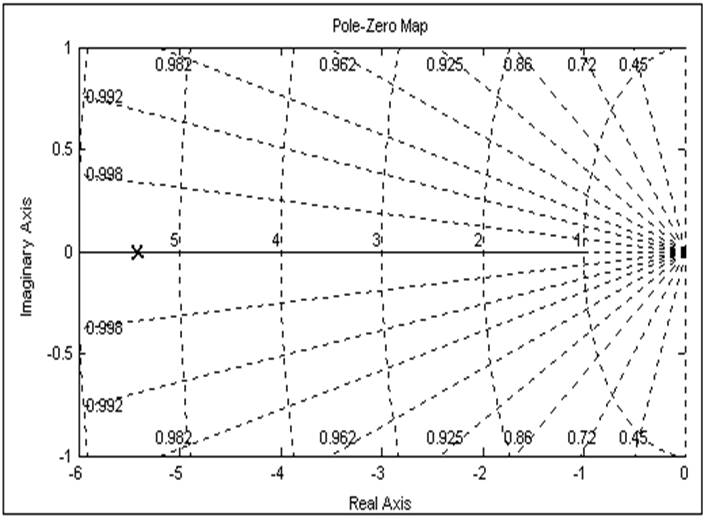
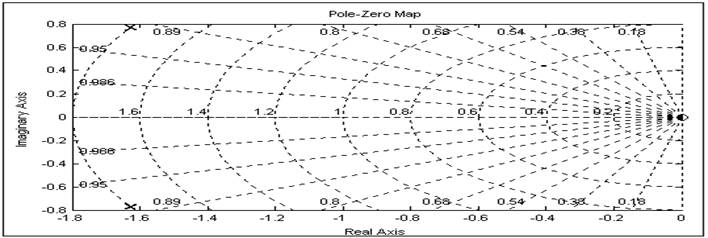
Корни характеристического уравнения:
Характеристики замкнутой САУ:

![]()

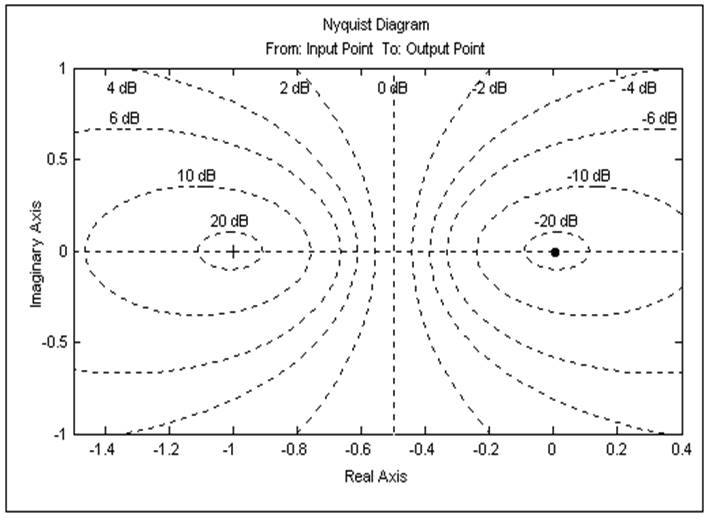
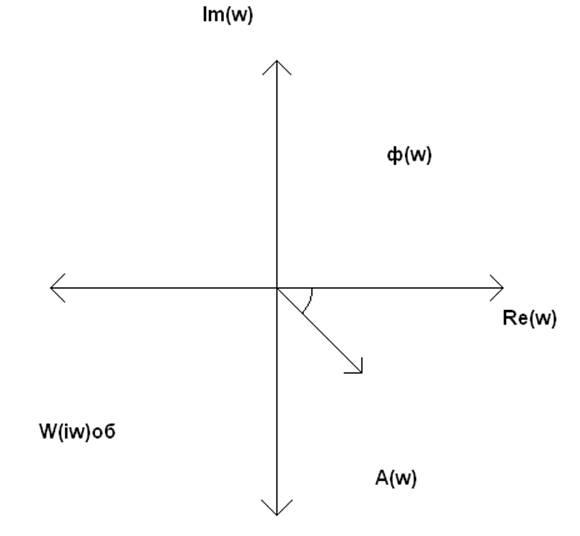
Амплитудно-фазовая характеристика:
Корни характеристического уравнения:
Графо-аналитический метод расчета настроек регулятора.
Построение АФХ объекта.
1-ый вариант
W(jω)=Kоб*e^-jωτоб/1+ jωТоб=А(ω)e^-jφ(ω);
где А(ω)= Kоб/√1+ jωТоб^2;
φ(ω)=-ωτоб-arctgωТоб;
|
ω, 1/с. |
0 |
0,02 |
0,04 |
0,06 |
0,1 |
0,12 |
0,16 |
0,2 |
|
А(ω) |
0,8 |
0,79 |
0,79 |
0,79 |
0,79 |
0,79 |
0,79 |
0,79 |
|
φ(ω),(рад) |
0 |
-0,12 |
-0,25 |
-0,38 |
-0,64 |
-0,77 |
-1,03 |
-1,29 |
W(jω)=Kоб*e^-jωτоб/1+ jωТоб= 0,8*e^-j0,1ω/1+ j0,02ω;
Графо-аналитический метод расчета настроек ПИ-регулятора.
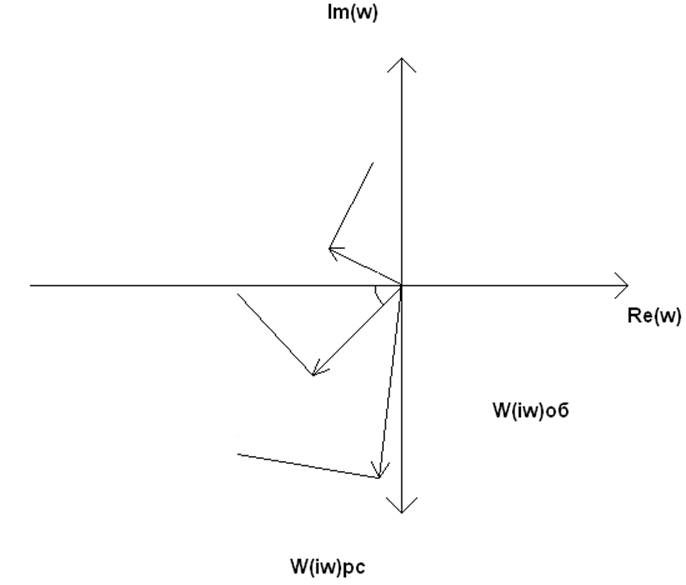
|
Ти |
30 |
35.6 |
45 |
|
ri |
1 |
0.89 |
0.75 |
|
Kp=1/ ri |
1 |
1.124 |
1.33 |
![]()
Кр=1,1
Ти=32,5
Расчет настроек регулятора.
Типовой процесс регулирования: апериодический.
П-регулятор Коб=0,3/Коб*τоб/Тоб=0,3/0,8*0,1/0,02=0,075.
ПИ-регулятор Коб=0,7/Коб*τоб/Тоб=0,7/0,8*0,1/0,02=0,175.
Ти=0,6Тоб=0,6*0,02=0,012.
ПИД-регулятор Коб=0,95/Коб*τоб/Тоб=0,95/0,8*0,1/0,02=0,23.
Ти=2,4τоб=0,24.
Тпр=0,4τоб=0,04.
Типовой процесс регулирования: 20%-перерегулирование.
П-регулятор Кр=0,7/Коб*τоб/Тоб=0,7/0,8*0,1/0,02=0,175.
ПИ-регулятор Кр=0,7/Коб*τоб/Тоб=0,7/0,8*0,1/0,02=0,175.
Ти=0,7τоб =0,014.
ПИД-регулятор Кр=1.2/Коб*τоб/Тоб=1,2/0,8*0,1/0,02=0,3.
Ти=2,0τоб=2*0,1=0,2.
Тпр=0,4τоб=0,4*0,1=0,04.
min∫∆x^2выхс/t.
П-регулятор Кр=0.9/Тоб*τоб/Тоб=0.9/0.8*0.1/0.02=0.225.
ПИ-регулятор Кр=1/Тоб*τоб/Тоб=1/0.8*0.1/0.02=0.25.
Ти=Тоб=0.8.
ПИД-регулятор Кр=1.4/Коб*τоб/Тоб=1.4/0.8*0.1/0.02=0.35.
Ти=1.3τоб=1.3*0.1=0,35.
Тпр=0,5τоб=0,5*0,1=0,05.
Кр-коэффициент усиления регулятора;
τоб-запаздывание объекта;
Тоб-постоянная времени объекта;
δст-остаточное отклонение регулируемой величины после процесса регулирования;
Ти-время изодрома регулятора.
В процессе настройки П-регулятора, И-регулятора, ПИ-регулятора, было показано, что характер переходного процесса и, следовательно, качество регулирования определяется не только законом регулирования, но и значениями настройки регуляторов. При разных настройках одного и того же закона можно получить переходные процессы, отличающиеся друг от друга значениями перерегулирования, временем регулирования и т.д. Поэтому для оценки работы автоматической системы необходимо сравнивать отдельные показатели качества ее регулирования с какими-то процессами регулирования, принятыми за оптимальных настроек регулятора.
Об оптимальности регулятора можно судить, только если известны все составляющие данную систему объекты (или объект), а также все критерии и ограничения, которым должна удовлетворять данная система регулирования. К таким ограничениям можно, к примеру, отнести характер переходного процесса (время регулирования, максимальный динамический коэффициент отклонения и другие), также на САУ накладываются ограничения по надежности, простоте, и что в настоящее время особенно актуально по стоимости. Таким образом, систему можно назвать оптимальной, если
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.