В4.2 По кинематическому признаку различают колебания:
· периодические (при которых каждое значение колеблющейся величины повторяется через равные промежутки времени, называемые периодом колебаний), непериодические и даже почти периодические;
· детерминированные (определенные, неслучайные) и случайные;
· стационарные (амплитуда и частота которых не меняются во времени) и нестационарные.
Под динамической системой будем понимать механическую систему, элементы которой наделены свойством инерции. Иными словами, динамическая система - это расчетная модель сооружения (механическая система), элементы которой обладают массой.
Классификацию динамических систем проведем по трем независимым признакам: по числу степеней свободы, по характеру изменения полной энергии системы и по типу математической модели системы.
Под свободой в динамике сооружений понимают возможность перемещения массы. Числом степеней (динамической) свободы называют число независимых геометрических параметров, однозначно определяющих положение всех масс системы при движении в любой момент времени.
Все реальные объекты имеют массу и упругие связи, непрерывно распределенные по объему, т.е. состоят из бесконечного числа материальных точек. Такие системы называют системами с распределенными параметрами. Число степеней свободы реальной системы, всегда бесконечно велико.
Особенности строения конструкции и распределения нагрузок часто позволяют принять некоторые допущения, упрощающие математическое исследование динамической системы:
- масса системы представляется сосредоточенной в конечном числе материальных точек или абсолютно твердых тел,
- все деформируемые элементы расчетной модели считаются лишенными массы (безинерционными).
Такие модели называют системами с конечным числом степеней свободы. Из этой классификационной группы особо выделяют простейшую динамическую систему - систему с одной степенью свободы, исследование которой уже дает возможность установить общие свойства колебательных процессов, ответить на вопрос о мероприятиях по ослаблению вредного или усилению полезного действия колебаний. Кроме того, исследование более сложных моделей в некоторых случаях можно свести к исследованию систем с одной степенью свободы (см. далее «разложение по собственным формам»).
Таким образом, по числу степеней свободы расчетные модели разделяют на
- системы с одной степенью свободы;
- системы с конечным числом степеней свободы;
- системы с бесконечным числом степеней свободы.
В настоящее время основным методом расчета, реализованным в большом количестве программных комплексов, является метод конечных элементов. Как известно, основная идея МКЭ состоит в замене системы с распределенными параметрами дискретной моделью, которая состоит из совокупности конечных элементов, взаимодействующих между собой в узловых точках. Такие модели представляют собой системы с конечным числом степеней свободы при решении статических и динамических задач. Поэтому большая часть предлагаемого курса динамики будет посвящена именно системам с конечным числом степеней свободы.
Приведем некоторые примеры систем с конечным числом степеней свободы.
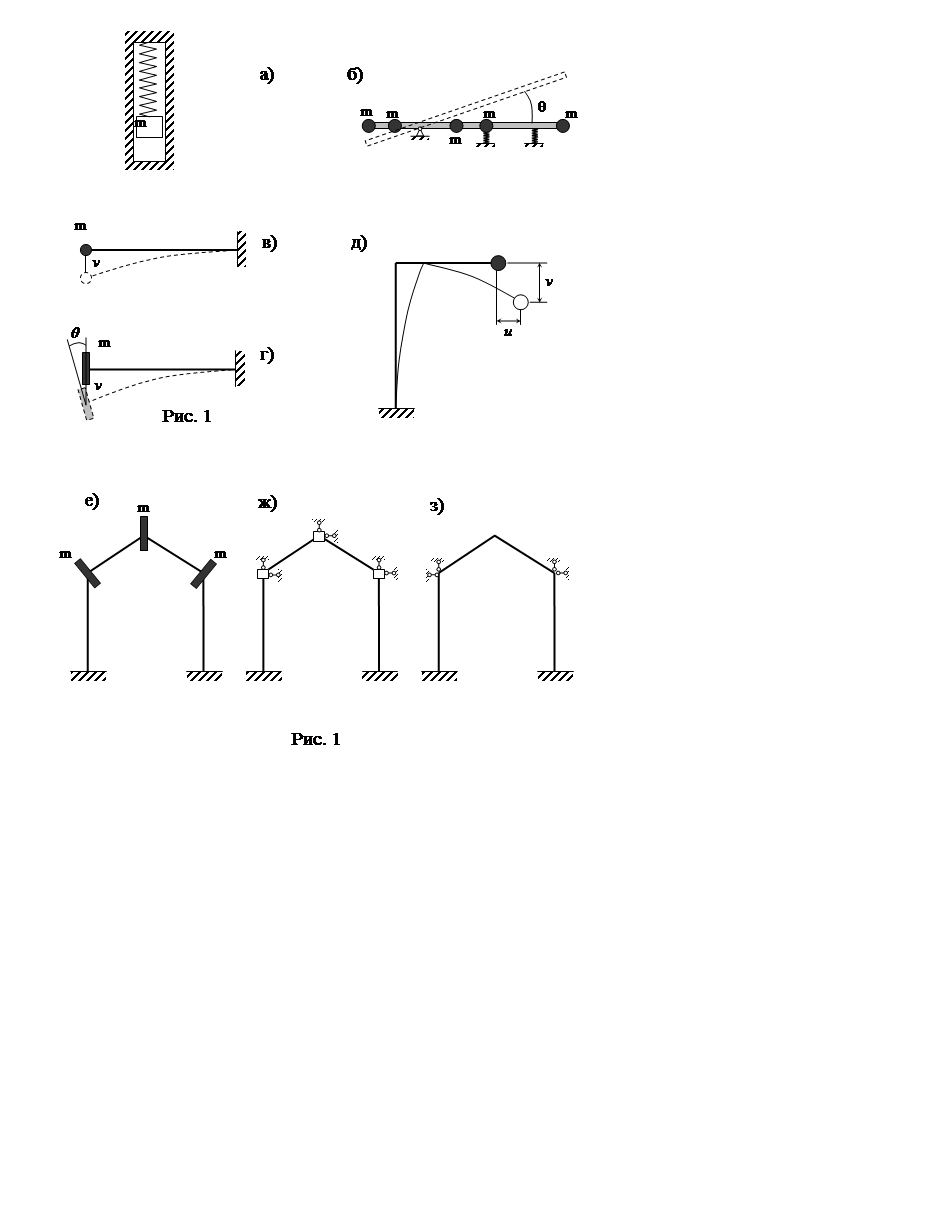
Груз, подвешенный на пружине (рис. 1,а), массой которой по сравнению с массой груза можно пренебречь, является динамической системой с одной степенью свободы, так как эта единственная масса способна совершать колебания вдоль одной фиксированной прямой.
Стержень (рис. 1,б) бесконечно большой жесткости, имеющий неподвижную ось вращения, проходящую через точку О, является системой с одной степенью свободы независимо от числа масс и упругих опор, так как положение масс определяется одним параметром - углом поворота φ стержня относительно центра О.
Невесомая деформируемая консоль, несущая сосредоточенную массу (рис. 1,в), представляет собой систему с одной степенью свободы в предположении, что перемещением массы вдоль оси балки можно пренебречь.
Если размеры груза на консоли таковы, что массу следует рассматривать как тело конечных размеров (рис. 1,г), то необходимо учитывать как инерцию поступательного перемещения, так и инерцию вращения груза. Следовательно, при отсутствии перемещения вдоль оси балки такая система имеет две степени динамической свободы.
Положение точечной массы, закрепленной на раме (рис. 1,д), определяется двумя координатами и, следовательно, число степеней свободы системы равно двум.
Плоская рама, несущая три сосредоточенные массы, представляет собой систему с девятью степенями свободы в случае (рис. 1 ж), если продольная и изгибная жесткости стержней - конечные величины, а масса представляет собой тело конечных размеров. При той же геометрии рамы число степеней свободы сократится до двух в предположении нерастяжимости стержней и точечности масс (рис. 1 з).
Все описанные выше схемы предполагались плоскими. В случае их пространственной работы число степеней свободы дополнится теми перемещениями масс из плоскости, которым не препятствуют связи системы. Напомним, что положение точки в пространстве определяется тремя, а положение абсолютно твердого тела шестью геометрическими параметрами.
В5.2 Классификация динамических систем по характеру изменения полной энергии системы.
Система называется консервативной, если полная механическая энергия системы при ее свободных колебаниях остается постоянной. В противном случае система называется неконсервативной.
На консервативную систему действуют потенциальные силы.
Неконсервативные системы делятся на диссипативные (полная энергия убывает при свободных колебаниях) и автоколебательные (в систему поступает энергия от неколебательного источника).
В5.3 Классификация динамических систем по типу математической модели.
По типу дифференциальных уравнений, описывающих колебания, системы делятся на линейные и нелинейные (говорят также о линейных и нелинейных колебаниях).
Напоминание: дифференциальные уравнения называются линейными, если неизвестные функции входят в них линейно, т.е. – в первой степени и с постоянными коэффициентами.
Для линейной системы справедлив принцип суперпозиции решений, для нелинейных – нет.
Анализ последних усложняется отсутствием так называемых, регулярных методов решения нелинейных дифференциальных уравнений.
Прибегают к различным численным способам его решения. Один из таких способов будет рассмотрен при обсуждении лабораторных работ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.