




Расчет внутреннего контура регулирования.
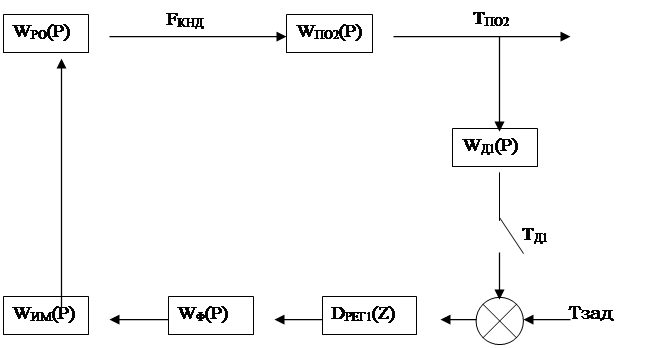 |
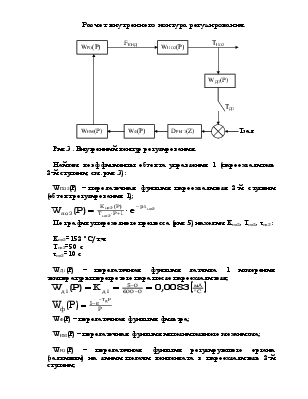
Рис.3. Внутренний контур регулирования.
Найдем коэффициенты объекта управления 1 (пароохладитель 2-й ступени, см. рис.3):
Кпо2=152 ºС/т/ч
Тпо2=50 с
τпо2=10 с
 |
WФ(Р) – передаточная функция фильтра;
WИМ(Р) – передаточная функция исполнительного механизма;
WРО(Р) – передаточная функция регулирующего органа (задвижки) на линии подачи конденсата в пароохладитель 2-й ступени;
Для исполнительного механизма и регулирующего органа объединим передаточные функции WИМ(Р) и WРО(Р) в одну передаточную функцию WИМ+РО(Р):
DРЕГ1(Z) – передаточная функция регулятора 1:
Для регулирования внутреннего контура применяем ПИ-закон регулирования. Это позволит увеличить точность регулирования, уменьшить время отработки задающего воздействия, свести статическую ошибку к 0 (нулю).
определим дискретную передаточную функцию непрерывной части (НЧС) цифровой САУ:
DНЧС(Z)=Z{WФ(P)·WИУ(Р) ·WИМ+РО(Р) ·WПО2(Р) ·WД(Р)} (1)
 |
 |
где α=1/ТПО2.
 |
Дискретная передаточная функция цифрового регулятора с ПИ- алгоритмом управления будет следующая:
D(Z)=DНЧС(Z)·DP(Z) (9)
где КС=КПО2·КД·КИУ.
С помощью метода расширенных АФЧХ разомкнутой САУ производим построение границы колебательной устойчивости и линии равной колебательности.
Полагаем, что 1+D(Z) = 0.
После некоторых преобразований, группировки и решения системы относительно С1 и С2, получим уравнения для их нахождения [9].
Используя программу В1 рассчитываем на ПЭВМ границу колебательной устойчивости (М=0) и линию равной колебательности (М=0,8) (таблица 6 и 7).
а) определение границы колебательной устойчивости (М=0) – см. рис.7.
б) определение линии равной колебательности (М=0,8) – см. рис.8: находим оптимальные настройки регулятора 1:
С1=0,849 ; С2=0,640 .
Используя программу В2 [9] производим построение переходного процесса по управляющему воздействию (единичному) (см. рис.9) при разных настройках С1 и С2:
а) при С1=0,849 и С2=0,640
перерегулирование составляет 23%, что в переводе на градусы ºС =2,3 ºС (таб.8).
б) при других настройках: С1=0,801 и С2=0,677
перерегулирование составляет 3,4%, что в переводе на градусы ºС =0,3 ºС (таб.9).
в) С1=0,821 и С2=0,601
перерегулирование составляет 26%, что в переводе на градусы ºС =2,6 ºС (таб.10).
При построении графика переходного процесса с разными настройками С1 и С2 (рис.9) видно, что минимальное перерегулирование будет при С1=0,801 и С2=0,677 (не более 3,4%).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.