КРАНОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С
МИКРОКОНТРОЛЛЕРНЫМ ОГРАНИЧИТЕЛЕМ ГРУЗОПОДЪЕМНОСТИ
Томский политехнический университет
Научный руководитель: , к.т.н.
Надёжность и безопасность находящихся в эксплуатации грузоподъёмных кранов мостового типа, особенно отработавших нормативный срок службы, в значительной степени определяются уровнем их оснащённости приборами и устройствами безопасности, важнейшими из которых являются ограничители грузоподъёмности и регистраторы параметров работы крана. В настоящее время около 90% всех козловых и мостовых кранов отработали свой нормативный срок службы, а это предусматривает, в соответствии с действующими руководящими документами [1], их реконструкцию, согласованную с заводом изготовителем, либо ограничение их первоначальной нормативной грузоподъемности.
Методы ограничения грузоподъемности кранов мостового типа выполненных на основе асинхронного электропривода представлены на рис. 1. В выпускаемых промышленностью в настоящее время ограничителях грузоподъёмности для кранов мостового типа используются методы непосредственного измерения механических напряжений, возникающих от действия перемещаемого груза (прямые методы). Оснащение таким ограничителем требует внесения изменений в металлоконструкцию крана, что повышает стоимость оснащения, а внешние датчики силы существенно уменьшают надежность ограничителя, вследствие отказов.
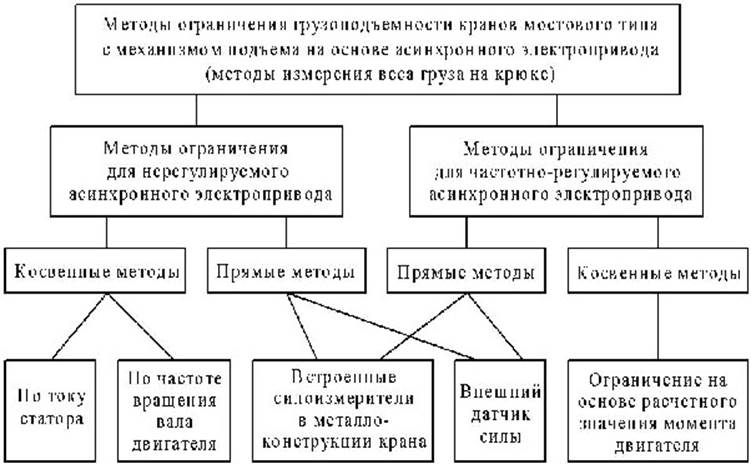
Рис. 1. Методы ограничения грузоподъемности кранов мостового типа
Построение ограничителя на основе расчетного значения момента по фазным токам двигателя для частотно-регулируемого кранового электропривода является методом, не требующим дополнительных аппаратных средств, а может быть осуществлено программными средствами.
В настоящее время для используемых в промышленности нерегулируемых крановых электроприводов перспективным является разработка ограничителя грузоподъемности с использованием современных программируемых микроконтроллеров (МК) и косвенных методов измерения массы поднимаемого груза на основе информативных параметров асинхронного двигателя (АД).
Для выявления информативных параметров, по которым возможно определение массы поднимаемого груза m, была разработана математическая модель кранового электропривода, состоящая из математической модели асинхронного двигателя, механизма подъема мостового крана и электромагнитного тормоза [2-4].
В результате проведенных исследований на математической модели информативными параметрами, характеризующими массу поднимаемого груза являются: частота вращения n и ток статора I1. На рис. 2, 3 представлены зависимости этих параметров от массы поднимаемого груза m.
Рис. 2. Зависимость n=f(m) кранового Рис. 3. Зависимость n=f(I1) кранового электропривода электропривода
Из графиков наглядно видно, что зависимость n(m) практически линейна, а I1(m) имеет небольшую нелинейность. Это обстоятельство позволяет легко переходить от данных параметров АД к массе поднимаемого груза и вводить такие зависимости в память МК ограничителя грузоподъемности. Информативную характеристику n(m) следует вводить в МК непосредственно на кране путем поочередного поднятия пустой крюковой подвески (m=0) и всего одного груза известной массы [5]. Для характеристики же I1(m) следует поднять 3-4 груза для получения более точной нелинейной характеристики.
Таким образом, в память МК вводится линеаризованная или состоящая из отрезков линейных функций зависимость информативного параметра от массы поднимаемого груза m, чем обеспечивается процесс «обучения» МК ограничителя. Кроме того, ввод характеристики непосредственно на кране позволяет учитывать его индивидуальные особенности, такие как передаточное число механизма, кратность полиспаста, КПД механизма, а также технологический разброс параметров электродвигателя и степень износа механизма подъема при работе в режиме «измерения» поднимаемого груза.
Для определения и учета влияния отклонений параметров питающей сети на определение массы груза необходимо рассмотреть момент, развиваемый АД, в функции фазного напряжения Uф и частоты питающей сети f. Если максимальное отклонение фазного напряжения Uф составляет ±10%, а частоты сети f – ±1%, ошибка в определении массы груза по зависимостям рис. 2-3 может достигать 50% [3, 5].
Поэтому для учета этой погрешности необходимо представить зависимость момента АД в функции информативного параметра М=f(i) в виде:
M = f (i)⋅kU ⋅k f , где i – информативный параметр (частота вращения n или ток статора I1), по которому определяется момент М; kU – коэффициент, учитывающий изменение напряжения питающей сети; kf – коэффициент, учитывающий изменение частоты питающей сети.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.