

























МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
РАСЧЁТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Теория электропривода»
на тему: «ЭЛЕКТРОПРИВОД СТОЛА
ПРОДОЛЬНО-СТРОГАЛЬНОГОМЕХАНИЗМ
ПРОДОЛЬНОЙ ПОДАЧИ СУППОРТА ТОКАРНОГО СТАНКА»
Исполнитель: студент гр. ЭП-41
Руководитель:
Дата проверки: ___________________
Дата допуска к защите: ___________________
Дата защиты: ___________________
Оценка работы: ___________________
Подписи членов комиссии по защите курсовой работы: _________________________________
Гомель 201006
СОДЕРЖАНИЕ
Введение…………………………………………………………………………
1. Технологическое описание механизма…………………………………...
2. Диаграммы скорости и статических нагрузок……………………………
3. Выбор системы электропривода и электродвигателя……………………
4. Скоростная и упрощённая нагрузочная диаграммы электропривода…..
5. Проверка электродвигателя………………………………………..............
6. Выбор оборудования и расчёт параметров электропривода…………….
7. Статические характеристики……………………………………………...
8. Анализ переходных процессов……………………………………………
9. Окончательная проверка электродвигателя……………………………...
10. Энергетика электропривода……………………………………………….
11. Схема управления………………………………………………………….
Заключение……………………………………………………………………...
Список литературы……………………………………………………..............
Введение
Широкое внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах, являются одной из важнейших задач народного хозяйства.
В данном курсовом проекте требуется разработать
электропривод стола продольно-строгальногомеханизма
продольной подачи токарного станка. Проектирование системы
электропривода производственного механизма требует решение следующих задач:
выбор системы электропривода и электродвигателя, выбор оборудования и расчёт
параметров, расчёт энергетики для формирования требуемых статических и
динамических характеристик.
1. Технологическое описание механизма
На основании задания на курсовое проектирование [1] к
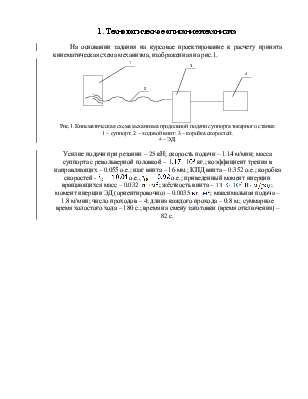
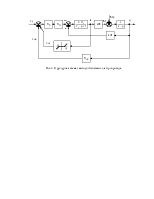
расчету принята кинематическая схема механизма, изображенная на рис.1.
Рис.1.
Кинематическая схема главного привода продольно-строгальногомеханизма
продольной подачи суппорта токарного станка:
1 – суппортдеталь;
2 – ходовой
винтстол; 3 – электродвигателькоробка
скоростей;
4 – ЭДредуктор; 5 –
реечная шестерня; 6 – зубчатая рейка.
Масса
стола mст = 6000 кг; масса детали mдет = 8000 кг; длина обрабатываемой поверхности l = 5,4 м; сила резания F2 = 50 кН; рабочая скорость прямого хода стола υпр
= 28 м/мин; пониженная скорость при входе и выходе резца из металла υпон
= 6 м/мин; скорость обратного хода стола υо = 75 м/мин; модуль
зубчатой рейки mз.р. = 12 мм; передаточное число редуктора iр = 4,95; КПД редуктора ηр = 0,65;
коэффициент трения в направляющих стола μ = 0,075; переход стола Δl = 90 мм.
Число
заходов реечной шестерни z = 10; приведенный момент инерции вращающихся масс
составляет 25% момента инерции электродвигателя; расчетная длина хода стола L = l + Δl.
Усилие подачи при резании – 25 кН; скорость
подачи – 1.14 м/мин; масса суппорта с револьверной головкой – ![]() кг.;
коэффициент трения в направляющих – 0.055 о.е.; шаг
винта – 16 мм.; КПД винта – 0.352 о.е.;
коробка скоростей -
кг.;
коэффициент трения в направляющих – 0.055 о.е.; шаг
винта – 16 мм.; КПД винта – 0.352 о.е.;
коробка скоростей - ![]() о.е.,
о.е.,
![]() о.е.;
приведенный момент инерции вращающихся масс – 0.032
о.е.;
приведенный момент инерции вращающихся масс – 0.032 ![]() ;
жёсткость винта –
;
жёсткость винта – ![]() ;
момент инерции ЭД (ориентировочно) – 0.0035
;
момент инерции ЭД (ориентировочно) – 0.0035 ![]() ;
максимальная подача – 1.8 м/мин; число проходов – 4; длина каждого
прохода – 0.8 м.; суммарное время холостого хода – 180 с.; время на
смену заготовки (время отключения) – 82 с.
;
максимальная подача – 1.8 м/мин; число проходов – 4; длина каждого
прохода – 0.8 м.; суммарное время холостого хода – 180 с.; время на
смену заготовки (время отключения) – 82 с.
2. Диаграмма скорости и
статических нагрузок
Радиус приведения механизма:
где mз.р. = 12 мм – модуль зубчатой рейки;
z = 10 – число заходов реечной шестерни;
iр = 4,95 – передаточное число редуктора;
Усилие при прямом ходе стола:
Fпр = F2 + µ·(mст + mдет)·g = 50000 + 0,075·(6000 + 8000)·10 = 60500 Н.
где F2 = 50 кН – сила резания;
µ = 0,075 – коэффициент трения в направляющих стола;
mст = 6000 кг – масса стола;
mдет = 8000 кг – масса детали.
Усилие при обратном ходе стола:
Fo = µ·(mст + mдет)·g = 0,075·(6000 + 8000)·10 = 10500 Н.
Статический момент при прямом ходе стола:

где ηр = 0,65 – КПД редуктора.
Статический момент при обратном ходе стола:

Расчетная длина хода стола:
L = l + Δl = 5,4 + 0,09 = 5,49 м где l = 5,4 м – длина обрабатываемой поверхности;
Δl = 90 мм – переход стола.
Линейные скорости на каждом участке работы:
– рабочая скорость прямого хода стола υпр = 28 м/мин = 0,467 м/с;
– пониженная скорость υпон = 6 м/мин = 0,1 м/с;
– скорость обратного хода стола υо = 75 м/мин = 1,25 м/с.
Время прямого хода:
Время движения на пониженной скорости:
Время обратного хода:
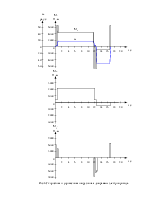
Рис.2. Диаграмма скорости и статических нагрузок.
3. Выбор системы электропривода и предварительный выбор электродвигателя
Выбираем систему электропривода: тиристорный преобразователь – двигатель.
Выбор электродвигателя будет производиться по эквивалентному моменту.
Эквивалентный статический момент:

где Мci – статический момент на i-м участке диаграммы;
ti – длительность i-го участка;
k – число рабочих участков диаграммы;
n – число всех участков.
Для режима S1 принимаем k = n.
Определяем номинальный момент выбираемого двигателя с учетом влияния динамических режимов через коэффициент запаса Кзд = 1,3.
Мн = Кзд · Мс.э. = 1,3 · 1864 = 2423 Н·м
Угловые скорости двигателя на каждом участке работы механизма:
– угловая рабочая скорость прямого хода стола
– угловая пониженная скорость
– угловая скорость обратного хода стола
Выбираем двигатель 4П-355-43-110-У3 и сводим его параметры в таблицу 1.
Таблица 1
|
Рн, кВт |
Uн, В |
nн, об/мин |
nmax, об/мин |
ηн, % |
λm |
J, кг·м2 |
|
110 |
440 |
400 |
1400 |
85,5 |
2,25 |
12 |
Номинальный ток двигателя:
Определяем сопротивление якорной цепи (т.к. отсутствуют данные в каталоге) в нагретом состоянии:

Номинальная угловая скорость двигателя:


Номинальный момент двигателя:
Мн = КФн · Iн = 9,7 · 292 = 2832 Н·м
Индуктивность якорной цепи:

4. Скоростная и упрощенная нагрузочная диаграммы электропривода
Т.к. величина допустимого или требуемого ускорения механизма не задана, то допускаем, что переходные процессы протекают при максимально допустимом моменте электродвигателя:
М = λm · Мн = 2,25 · 2832 = 6372 Н·м где λm = 2,25 – перегрузочная способность двигателя.
Величина динамического момента:
Мд1 = М – Мо = 6372 – 388 = 5984 Н·м;
Мд2 = М – Мпр = 6372 – 2234 = 4138 Н·м;
Мд3 = –М – Мпр = –6372 – 2234 = –8606 Н·м;
Мд4 = –М – Мо = –6372 – 388 = –6760 Н·м;
Мд5 = –М – (–Мо) = –6372 – (–388) = –5984 Н·м;
Мд6 = М – (–Мо) = 6372 – (–388) = 6760 Н·м.
Суммарный момент инерции:
J = Jдв + 0,25·Jдв + (mст + mдет)·ρ2 =
=12 + 0,25·12 + (6000 + 8000)·0,0242 = 23 кг·м2
Угловое ускорение:
Время на каждом участке изменения скорости:
Рис.3. Скоростная и упрощённая нагрузочная диаграммы электропривода.
5. Проверка электродвигателя
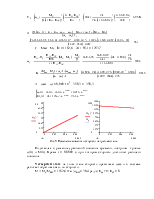
Проверка двигателя по нагреву и перегрузочной способности проводим методом эквивалентного момента по следующей формуле:
где βi – коэффициент, учитывающий ухудшения условий охлаждения.
При анализе тепловых режимов для большинства выпускаемых двигателей теплоотдача изменяется с изменением скорости. На практике это оценивается через коэффициент ухудшения охлаждения β.

где Аi – теплоотдача при i-ой скорости;
А – теплоотдача при номинальной скорости.
На практике чаще всего приходится сталкиваться с ухудшением охлаждения при пуске и торможении двигателя, принимая, что скорость изменяется линейно:
где β0 – коэффициент, учитывающий ухудшение условий охлаждения при неподвижном роторе (якоре), зависящий от исполнения двигателя. Для двигателей серии 4П принимаем β0 = 0,95.

Эквивалентный момент с учётом условий охлаждения:

Так как Мэ = 2198 Н·м < Мн = 2832 Н·м, то выбранный двигатель подходит по нагреву.
Так как Мп = Мдоп, то данный двигатель проходит и по перегрузочной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.