1. Датчики частоты вращения: тахогенераторы постоянного тока и асинхронные- принцип действия, схемы включения, характеристики.
Принцип действия.Тахогенераторы постоянного тока выполняют с постоянными магнитами на статоре или с электромагнитным возбуждением от независимого источника постоянного тока.При неизменном токе возбуждения Iв,т.е. при низменном потоке F,ЭДС пропорциональна частоте вращения:E=cФn,что являетя основой для использования машин постоянного тока в качестве тахогенератора.Выходное напряжение его
U=E-IaRa=E-U/Rnr где Rn-сопротивление нагрузки.
Запишем уравнение выходной характеристики тахогенератора:
U=E/(1+Ra/Rn)=cФn/(1+Ra/Rn) где Ra-Суммарное сопротивление(значек суммы поставь мудак вперди Ra).
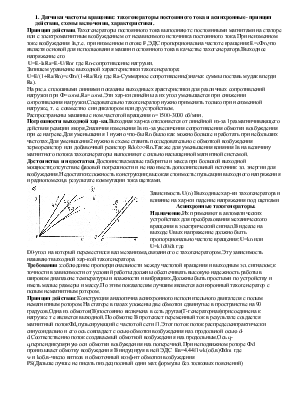
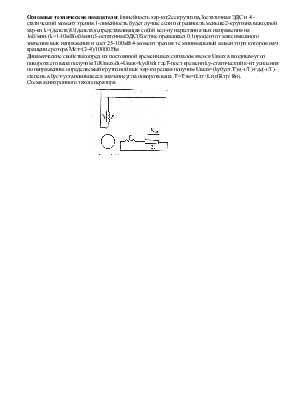
На рис.a сплошными линиями показаны выходные характеристики для различных сопротивлений нагрузки при Ф=const,Ra=const.Эти хар-ки линейны а их угол уменьшается при снижении сoпротивления нагрузки.Следовательно тахогенератор нужно применять только при неизменной нагрузке, т. е. совместно с индикатором или др.устройством.
Распространены машины с ном.частотой вращения n=1500-3000 об/мин.
Погрешности выходной хар-ки.Выходная хар-ка отклоняется от линейной из-за 1размагничивающего действия реакции якоря,2наличия изменения Iв из-за увеличения сопротивления обмотки возбуждения при ее нагреве.Для уменьшения 1 нужно что-бы Rn было как можно больше и работать при небольших частотах.Для уменьшения2 нужно в схеме ставить последовательно с обмоткой возбуждения терморезистор или добавочный резистор Rdob>>Rn.Так же для уменьшения влияния Iв на величину магнитного потока тахогенераторы выполняют с сильно насыщенной магнитной системой.
Достоинства и недостатки.Достоинства:малые габориты и масса при большой выходной мощности;отсутствие фазовой погрешности и не нао иметь дополнительный источник эл. энергии для возбуждения.Недостатки:сложность конструкции;высокая стоимость:пульсации выходного напряжения и радиопомехи,в результате коммутации тока щетками.
Зависимость U(n) Выходные хар-ки тахогенератора и влияние на хар-ки падение напряжения под щетками
Асинхронные тахогенераторы.
Назначение.Их применяют в автоматических устройствах для преобразования механического вращения в электрический сигнал.В идеале на выходе Uвых напряжение должно быть пропорционально частоте вращения:U=kn или U=k1d0/dt где
D0-угол на который переместился вал механизма,связанного с тахогенератором.Эту зависимость называют выходной хар-кой тахогенератора.
Требования :соблюдение пропорциональности между частотой вращения и выходным эл. сигналом;к точности в зависимости от условий работы:должны обеспечивать высокую надежность работы в широком диапазоне температуры и влажности и вибрациях.Должны быть простыми по устройству и иметь малые размеры и массу.По этим показателям лучшим является асинхронный тахогенератор с полым немагнитным ротором.
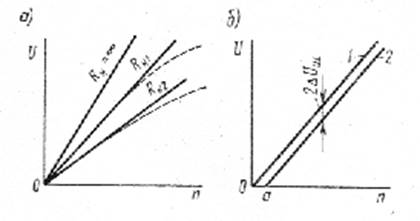
Принцип действия:Конструкция аналогична асинхронного исполнительного двигателя с полым немагнитным ротором.На статоре в пазах уложены две обмотки сдвинутые в пространстве на 90 градусов.Одна из обмоток(В)постоянно включена в сеть другая(Г-генераторная)присоединена к нагрузке т е является выходной.По обмотке В протекает переменный ток в результате создается магнитный потокФd,пульсирующий с частотой сети f1.Этот поток поток распределенпрактически синусоидально и его ось совпадает с осью обмотки возбуждения наз продольной осью d-d.Соответственно поток создаваемый обмоткой возбуждения наз продольным.Ось q-q,перпендикулярную оси обмотки возбуждения наз поперечной.При неподвижном роторе Фd пронизывает обмотку возбуждения В индуцируя в ней ЭДС Eв=4.44f1wk(об.в)Фdm где
w и kоб.в-число витков и обмоточный коэф-нт обмотки возбуждения
PS(Дальше лучше не писать пиздец полный одни мат.формулы без толковых пояснений)
Основные технические показатели:1линейность хар-ки;2ее крутизна,3остаточная ЭДС и 4 -статический момент трения.1-линейность будет лучше если погрешность меньше2-крутизна выходной хар-ки k=(дельта)U/(дельта)n,представляющая собой вел-ну нарастания вых напряжения на 1об/мин.(k=1-10мВ/об/мин)3-остаточнаяЭДС(Еост)не превышает 0.1процент от максимального значения вых напряжения и сост 25-100мВ 4-момент трения т е минимальный момент при котором нач вращение ротора Мст=(2-4)/10000 Нм
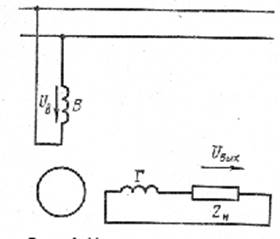 |
Схема асинхронного тахогенератора
5.Регулирование электромагнитного момента в системе ТП-Д.
Для стабилиз. момента при действии возмущения при пост. магнит. потоке используют отриц. обрат. связь по току.(Ф=const—M=c*Iя). Упрощен. схема.
Запишим сист. уравнений и решим ее относит. момента.
![]()
![]()
![]()
![]()
получим


В результате системы ос модуль жесткости меньше чем для разомкнутой системы. Т.е. хар-ки стали мягче и жесткости их увелич.
Кот1<Кот2
Поскольку Кос имеет конечное значение то компенсировать возмущение полностью невозможно и иногда используют комбинированное упр., дополняют ос для компенсации возмущения, т.е. положит. ос по скор. Учитывая что
![]() получим
получим
![]()
![]()
![]() получим
получим

модуль жесткости в данной системе
 меньше
чем в пред. случае и может быть отрицат. т.е. (рис)
меньше
чем в пред. случае и может быть отрицат. т.е. (рис)
![]() При обсолютно
мягкой хар. сис. нах. на границе устойчивости и критическое значение Кос будет
равно Кос.кр.=С/Кп. Введение компенсации в возмущение позволяет уменьшить
ошибку но за счет положит. ос ухудш. динамич. показатели.
При обсолютно
мягкой хар. сис. нах. на границе устойчивости и критическое значение Кос будет
равно Кос.кр.=С/Кп. Введение компенсации в возмущение позволяет уменьшить
ошибку но за счет положит. ос ухудш. динамич. показатели.
Для получения астатической.
Частотное регулирование момента.
 Если
при частотном регулир. управлять напряжением сохраняя магнитный поток и при
изменении упр-го напряжения частотой со скоростью меньше чем скорость
протекания эл-магн. переходных проц. , то замкнув систему ПЧ-АД отриц. ос по
моменту получим св-во аналогичное системе УП-АД , однако реализовать ос по М
сложно , поскольку ток статора и момент находятся в нелинейных зависимостях ,
поэтому чаще прибегают к компенсационному принципу управления , т.е. с положит
ос по скор. При этом :
Если
при частотном регулир. управлять напряжением сохраняя магнитный поток и при
изменении упр-го напряжения частотой со скоростью меньше чем скорость
протекания эл-магн. переходных проц. , то замкнув систему ПЧ-АД отриц. ос по
моменту получим св-во аналогичное системе УП-АД , однако реализовать ос по М
сложно , поскольку ток статора и момент находятся в нелинейных зависимостях ,
поэтому чаще прибегают к компенсационному принципу управления , т.е. с положит
ос по скор. При этом :
![]()
![]()
![]() -коэф. перед. упр-я по каналу
упр-ния частотой.
-коэф. перед. упр-я по каналу
упр-ния частотой.
![]() -сигнал задания момента
-сигнал задания момента
Кос- ос по скорости
При критическом Кос
Кос=1/![]() жесткость мех хар =0.
жесткость мех хар =0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.