В данном курсовом проекте разрабатывается САУ электропривода механизма передвижения мостового крана.
Мостовые краны нашли очень большое применение в промышленности и выполняют чаще всего вспомогательную работу по передвижению и доставке грузов, сборке оборудования. Выполнение проекта позволит более детально ознакомиться с технологическим процессом работы, как системы управления, так и всего механизма в целом.
Целью проекта является обеспечение необходимых показателей, которые должна обеспечить система управления. Более подробное описание цели проекта дается в первом пункте данного курсового проекта.
1. Технологические характеристики механизма.
Требования к САУ электроприводом.
Достижение высокой степени механизации и автоматизации производственных процессов многих производственных предприятий связано не только с выполнением главных технологических операций, но и со вспомогательными операциями по транспортировке сырья, готовой продукции и топлива, которые выполняются во многих случаях электрическими кранами.
Крановые электродвигатели получают питание от трехфазных сетей переменного тока завода. Основным является напряжение 380В и в перспективе намечается использование для крупных кранов напряжения 660В. По назначению, специфике работы и конструктивным особенностям мостовые электрические краны относятся к категории оборудования, имеющего повышенную опасность, что объясняется самим процессом его работы на площадках и в цехах, где одновременно находятся люди и дорогостоящее оборудование.
Каждый кран имеет механизм подъема, механизм передвижения моста и механизм передвижения грузовой тележки. Подвод тока к мостовым кранам осуществляется троллеями. Троллеи прокладываются вдоль цехов и крепятся с помощью изоляторов и держателей. Для изготовления троллеев применяют в основном стальной уголок, швеллер, полосу, ленту из стали или алюминиевых сплавов.
Крановые электроприводы имеют следующие основные типы защитных устройств; максимальную защиту, нулевую защиту для отключения электропривода при перерыве подачи питания.
Разновидностью нулевой защиты является нулевая блокировка, исключающая само запуск электродвигателя при восстановлении питания, если орган управления находится в рабочем положении; конечную защиту для предотвращения перемещения движущихся элементов конструкции в опасную зону. Выключение, т. е. подача питания, может осуществляться после отпирания включающего устройства с помощью индивидуального ключа-марки; ключ не может быть выгнут без выполнения операций отключения. Такая блокировка гарантирует приведение крана в действие только лицом, имеющим право на управление краном. Аппараты, входящие в схему защиты, могут быть встроены в общую для всего крана защитную панель.
В разрабатываемом курсовом проекте основными из требований предъявляемые к будущей системе автоматического управления электропривода является:
- необходимая и постоянная скорость передвижения равная 1,2 м/с
- допустимое ускорение не более 0,35 м/с2
Крановые электродвигатели по роду тока выбираются в зависимости от технических требований и на основании технико-экономического сравнения вариантов.
Динамические свойства электропривода при скалярном управлении определяются функцией задания частоты в переходном процессе и параметрами самого электропривода. Магнитный поток двигателя не остаётся постоянным, поэтому в переходном процессе возможны колебания электромагнитного момента и скорости. Для многих механизмов с умеренными требованиями к динамике скалярные системы частотного управления, как более простые и дешёвые, являются разумным техническим решением применения регулируемого электропривода. Однако существуют механизмы с высокими требованиями к динамике, где необходимо обеспечить максимальное быстродействие без колебаний скорости. Это возможно выполнить, если поддерживать точно на заданном уровне магнитный поток и электромагнитный момент в переходном процессе двигателя. Достичь этого можно только при векторном управлении.
2. Выбор системы электропривода и типоразмера электродвигателя.
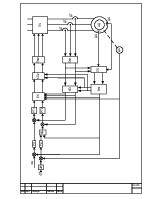
Исходя из требований предъявляемых к данной САУ была выбрана система электропривода НВ-АИН-ШИМ-АД.
Электродвигатель выбран из источника [ ]
Тип двигателя – 4А160М6У3
Синхронная частота вращения n0=1000 об/мин.
Номинальная мощность Pном=15000 кВт.
КПД η=0.875
Cos(φ)= 0.87
Параметры схемы замещения:
xμ=3
R11 – 0.062
X11 – 0.1
R22 – 0.028
X22 – 0.16
Пусковые свойства:
Момент инерции J- 0.18 кг·м^2
Номинальное скольжение Sном – 0,026
3. Выбор силового оборудования и расчет параметров ЭП.
Приведем параметры схемы замещения электродвигателя к абсолютным величинам:
где Iн – номинальный ток (А)
Uн – номинальное фазное напряжение (В),
η - номинальный КПД,
cos(φ) – номинальный коэффициент мощности – при нагрузке 100%.

Индуктивности статора и ротора следует рассчитывать по соотношениям:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.