Вопрос 7.Свойства статических систем.
|
 В
статических системах для наличия выходной величины необходима ошибка.
Статические системы бывают с единичной ОС. Это такие системы, в которых по
линии главной ОС весь выходной сигнал подается на вход для сравнения с входной
величиной, т. е. КОС =1; ХОС=Х2.
В
статических системах для наличия выходной величины необходима ошибка.
Статические системы бывают с единичной ОС. Это такие системы, в которых по
линии главной ОС весь выходной сигнал подается на вход для сравнения с входной
величиной, т. е. КОС =1; ХОС=Х2.
Статической называют ошибку, которая не изменяется во времени и не зависит от входной величины или изменяется по известному закону. Эту ошибку можно исключить
Строят системы, в которых устраняют статическую ошибку с помощью дополнительных устройств, но не с целью ее устранения, а потому что эти системы обладают полезными свойствами: повышенное быстродействие, независимость от коэффициента передачи отдельных звеньев. Такие системы называют инвариантными (независимыми)
В этой системе статическая ошибка равна нулю, в ней вых величина формируется из входной величины с помощью дополнительного канала.
Возмущение это воздействие, приводящее к изменению выходной величины при неизменной входной величины. Физические причины возмущения (изменение температуры, нагрузки, радиация и т. д. ), но все их можно свести к изменению коэффициента передачи какого-то звена.

ΔК - абсолютное изменение К под действием внешних воздействий.
δКВ= δВ – относительное изменение К, вызванное возмущением.
Возмущения прямого тракта ослабляются в (1+Кр) раз. То к стабильности Кпр в САУ не предъявляют особых требований. Уменьшить влияние возмущений прямого тракта можно путем увеличения Кр.
Кр статической системы выбирается не по величине статической ошибки, а по возмущениям элементов прямого тракта. Для этого надо знать возмущения прямого тракта или как изменяется коэффициент передачи прямого тракта. Они определяются либо экспериментально, либо расчетным путем.
m – коэффициент, учитывающий, какую долю от общей погрешности отводится на погрешность возмущений.
δпр – приведенная ошибка (класс точности)
δВ.пр – возмущения прямого тракта.
Помеха это паразитный сигнал, имеющий такую же природу как сигнал рассогласования. Чем ближе помеха приложена ко входу, тем сильнее она влияет на изменение выходной величины.
Порядок анализа свойств системы
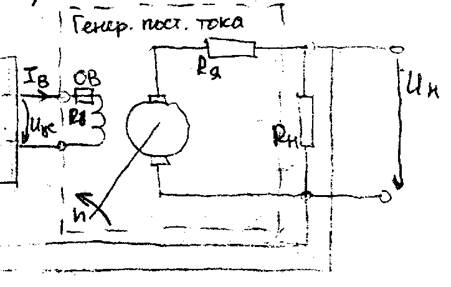
Генератор - это машина постоянного тока, состоящая из статора и якоря (ротора). В статоре создается магнитное поле с помощью либо обмотки возбуждения, либо постоянного магнита. В этом поле вращается якорь с витками. В якоре наводится ЭДС. С помощью токовенного устройства ( коллектора ) снимают постоянное напряжение.
Порядок анализа свойств системы.
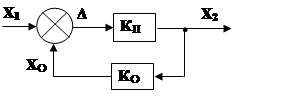
1. Составляется математическое описание элементов.
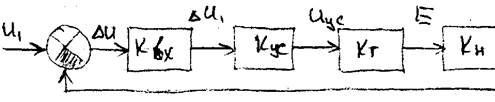
2. Составляются уравнения, связывающие выходную величину с ошибкой, уравнение сумматора
3. По уравнениям Хвых=f(∆Х) выделяются звенья направленного действия с коэффициентами передачи, желательно безразмерными, отражающие определенную физическую суть элементов.
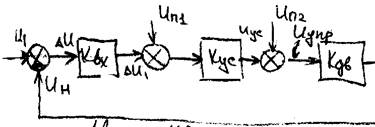
4. Рисуется структурная схема.
5. Анализ свойств.
Ег=к*Iв ( из справочника)
![]()
![]()
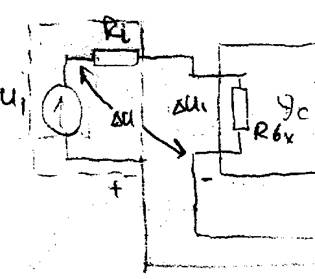
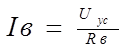
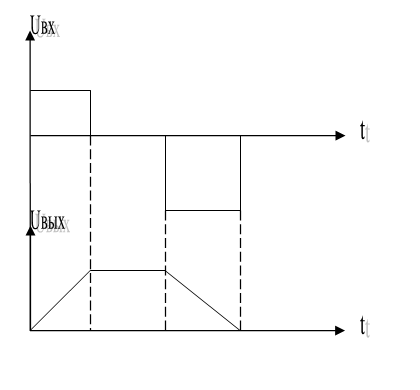
![]() ∆U=U1-Uн Uн=
∆U=U1-Uн Uн=![]()
Выводы:
1. Ошибка прямо пропорционально входному сигналу. ∆U=U1
2.∆U прямо пропорционально произведению коэффициентов передачи. Кр= Кн*Кг*Кус*Квх
Кр - коэффициент передачи разомкнутой системы. Кр можно увеличить только за счет увеличения Кус.
Усилитель в автоматических системах чтобы уменьшить ошибку.
3. Статическая ошибка = ![]() =
=![]() =
=![]() т.к Кр>>1
т.к Кр>>1
![]() называют
статизмом системы статизм=
называют
статизмом системы статизм=![]() *100%
*100%
![]()
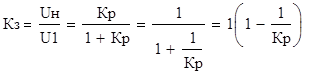
Кз – коэффициент замкнутой системы. По структурной схеме определяется как произведение, стоящих между выходом и входом сумматора со стороны ОС.
Свойства астатических систем в установившемся режиме.
Астатич. система делает интегрирующий элемент, который обладает свойством запоминания выходной величины, что позволяет достичь нулевую ошибку.
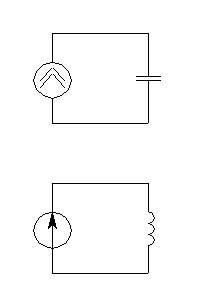
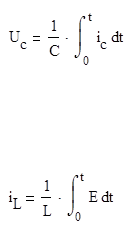
![]()
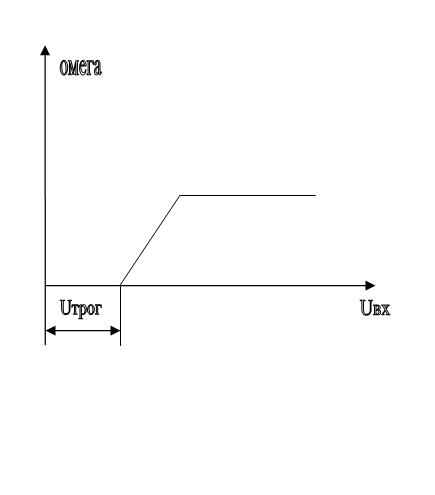
В реальных интегрирующих элементах в качестве интегрирующих элементов используют двигатели. Такие элементы имеют зону нечувствительности: вал двигателя начинает вращать при определенном напряжении Uтрог (а не при нулевом).
Еще одним интегрирующим элементом является интегрирующий усилитель.
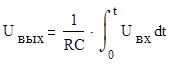
Этот усилитель не является идеальным, так как есть напряжение смещения и не может неограниченно долго хранить значение величины.

Причины возникновения ошибок в автоматических системах и способы их устранения.
1. Возмущение – различные факторы, влияющие на изменение коэффициентов передачи отдельных звеньев.
2. Помехи – это паразитные сигналы не несущие никакой полезной информации о рассогласовании, но имеющие такую же природу, как и сигнал рассогласования ( напряжение смещения ).
3. Эта причина имеет место в статических схемах – это сама статическая ошибка.
U1=U2+∆U U2=U1+∆U ∆U=U1/(1+Кр)
Влияние помех в астатической системе на изменение выходной величины

Uупр- напряжение управления двигателем
αп - учитывает люфт вращения вала
В идеальной системе помехи приложенные после ИЭ отрабатываются, так как Ωдвиг=0 при ∆U=0
В реальной системе такие помехи будут обрабатываться с точностью до зоны нечувствительности приложенной ко входу Uнчвх, т.е. ∆U= Uнчвх.
Люфт силового редуктора исполнительного двигателя можно представить помехой. Этот люфт также будет отрабатываться, поэтому силовые редукторы могут обладать люфтом ( на точность это не скажется ). Но на динамику устойчивой системы люфт оказывает существенное влияние.
Рассмотрим помехи, приложенные до ИЭ.
U упр= Uп2+ Кус*Uп1+Кус*Квх*∆U
U упр= Uп2+ Кус*Uп1+Кус*Квх*U1- Кус*Квх*Uн когда двигатель остановиться Ωдвиг=0 , то U упр=Uтрог
Uн=U1+Uп1/Квх+Uп2/(Кус*Квх)± Uтрог/(Кус*Квх)
т.к. Uн* Кус*Квх= 1U *Кус*Квх+Кус* Uп1+ Uп2± Uтрог
Помехи приложенные до ИЭ, влияют также как и в статической системе, т.е. чем ближе ко входу тем сильнее влияние.
Uнчвх может иметь любой знак. Напряжение смещения интегрирующего усилителя является помехой. Ее влияние можно уменьшить увеличением Кус.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.