2. Разработка изготовления и отладка лабораторно-испытательного стенда ШИП для электропривода постоянного тока
2.1. Разработка системы управления ШИП
2.1.1. Разработка функциональной и принципиальной электрической схемы системы управления ШИП
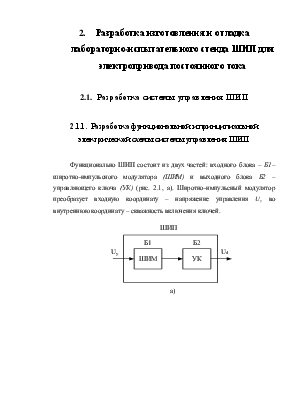
Функционально ШИП состоит из двух частей: входного блока – Б1– широтно-импульсного модулятора (ШИМ) и выходного блока Б2 – управляющего ключа (УК) (рис. 2.1, а). Широтно-импульсный модулятор преобразует входную координату – напряжение управления Uy во внутреннюю координату – скважность включения ключей.
а)
Рис. 2.1. Функциональные схемы ШИП (а) и ШИМ (б)
В состав ШИМ входят генератор опорного напряжения ГОН, вырабатывающий напряжение пилообразной формы Uоп с частотой fоп=1/Tоп, пороговое устройство ПУ, дающее сигнал минимального уровня (нулевой сигнал) при Uоп–Uy>0 и сигнал максимального уровня (единичный сигнал) при Uоп–Uy£0, формирователь управляющих импульсов ФУИ, преобразующий сигналы ГOH и ПУ в соответствующие управляющие импульсы для силовых управляющих ключей (УК) (рис. 2.1, б). Управляющий ключ реализует по средством включения и отключения транзисторов - заданную с помощью ШИМ скважность в виде выходной ЭДС ШИП.
Принципиальная схема системы управления ШИП представлена на рис. 2.2. Принцип действия следующий: после очередного разряда конденсатора С на выходе интегратора начинает возрастать по абсолютной величине напряжение до уровня, при котором произойдет переключение компаратора. На выходе DA2 появится отрицательное напряжение. При этом происходит быстрый разряд конденсатора через VD и R7. Компаратор возвращается в исходное состояние и процесс повторяется. Увеличение входного сигнала ускоряет изменение напряжения интегратора, растет частота срабатывания компаратора и в итоге возрастает выходная частота. На выходе интегратора DA1 формируется на сигнал опорного напряжения для ШИП который подается на инвертирующий вход компаратора DA3. Напряжение управления подается на инвертирующий вход DA1. Когда величина напряжения управления превышает величину опорного напряжения, на выходе компаратора формируется положительный сигнал, в обратном случае сигнал на выходе DA3 приобретает отрицательную полярность.
Рис. 2.2. Принципиальная схема системы управления ШИП
2.1.2.Расчет и выбор основных элементов электрической схемы системы управления
Исходные данные: напряжение управления – Uу=10В;
скважность – g=0,05–0,95;
напряжение питания – Uп=15В;
опорная частота – fоп=500Гц.
Расчет. Выбор операционных усилителей (ОУ) DA3 и DA4.
При выборе операционного усилителя (ОУ) будем исходить из следующих предпосылок:
1) операционный усилитель должен быть быстродействующим, т.к. это позволит с максимальной скоростью передать управляющий сигнал от схемы управления силовой схеме;
2) по возможности нужно выбрать ОУ с наибольшим выходным током, необходимым для последующего открытия транзистора;
3) при не выполнении предыдущего условия необходимо взять два операционных усилителя, либо в целях минимизации элементов на печатной плате выбрать двухканальный ОУ, содержащий в одном корпусе два одинаковых усилителя.
На основании вышеизложенного выбираем операционный усилитель серии К157УД2, со следующими параметрами [1]:
Uп=±15 В; Iпот£7 мА; Iвх£500 нА; DIвх£150 нА; Uсм=±10 мВ; Uвых max=±13 В; Iвых max=10 мА; Uсф вх max=±18 В; Iкз£45 мА; Ррас max=0,5 Вт.
Выбор потенциометра PR2.
Для того, чтобы входной ток DA3 не оказывал существенного влияния на равномерность распределения напряжения потенциометра PR2, т.е. для сохранения пропорциональности напряжений частей потенциометра их сопротивлениям примем IPR2треб³100IвхОУ3=100×500×10-9=50мкА. Потенциометр должен обеспечивать регулирование напряжения управления в пределах от 0 до 10В. Исходя из этого, можно рассчитать величину сопротивления потенциометра:

Выбираем потенциометр [2] серии ПП3-11 (1,5кОм).
Выбор сопротивления R8.

где IPR2 – ток проходящий через потенциометр PR2, 
Выбираем из стандартного ряда резистор серии МЛТ-0,25 (620Ом).
Выбор сопротивлений R9, R10, R11 и R12.
Сопротивления R9, R10, R11 и R12, необходимы для ограничения входного тока операционного усилителя, принимаем по 10 кОм.
Выбор операционных усилителей DA1 и DA2.
При выборе ОУ DA1 и DA2 воспользуемся следующими предпосылками:
1) операционный усилитель должен быть быстродействующим, что позволит свести к минимуму искажение сигналов преобразователя напряжение–частота;
2) в целях минимизации элементов на печатной плате использовать двухканальный ОУ.
Рис. 2.3. Временная диаграмма опорного напряжения преобразователя напряжение–частота и напряжения управления где зона отрицательного напряжения интегратора обуславливает наличие величины минимальной 5% скважности, а зона положительного напряжения интегратора, превосходящая величину максимального значения напряжения управления, обуславливает наличие величины максимальной 5% скважности.
Для удобства дальнейших расчетов перейдем от временной диаграммы (рис. 2.3) к геометрической плоскости (рис. 2.4).
Где AGºT, EGºgmin×T, BDº(1-gmax)×T. (2.1)
Треугольник АСЕ подобен треугольнику ВСD. Из подобия треугольников следует подобие высот т.е.
 (2.2)
(2.2)
Высоты DАСЕ и DВCD в соответствии с временными диаграммами пропорциональны следующим величинам напряжений:
CHºUоп maxи CFºUоп max-Uу max. (2.3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.