ku=1/(C*inv(-Az)*B)
ku =
151.9969
Проделанные вычисления позволяют реализовать моделирование процессов в среде Simulink.
2.2. Подготовка S–модели в среде Simulink.
На рис. 1 представлена блок-схема моделируемой системы.
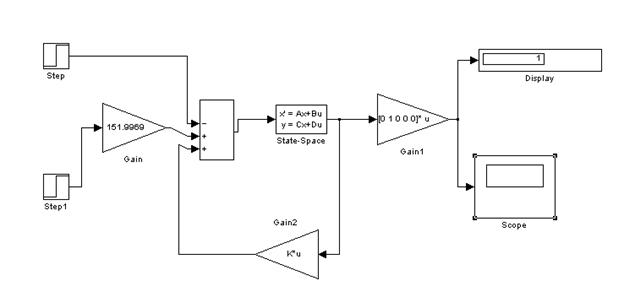
рис. 1
2.3. Исследование линейной непрерывной системы с модальным регулятором
2.3.1. Отработка ненулевых начальных условий.
В данном пункте требуется
подобрать для вектора ![]() такое значение, чтобы оно
соответствовало постоянной величине выходной переменной
такое значение, чтобы оно
соответствовало постоянной величине выходной переменной ![]() .
Поэтому: чтобы получить
.
Поэтому: чтобы получить ![]() нужно сделать
нужно сделать ![]() . Пусть
. Пусть ![]() .
Прочие переменные состояния могут быть любыми, поэтому есть смысл оставить их
нулевыми. В итоге получаем график процесса, представленного на рисунке 2.
.
Прочие переменные состояния могут быть любыми, поэтому есть смысл оставить их
нулевыми. В итоге получаем график процесса, представленного на рисунке 2.
рис. 2
2.3.2. Ступенчатое изменение уставки.
В этом случае начальные условия и возмущение равны нулю. Уставка, вначале тоже равна 0. Так как входной сигнал постоянен, выходной стабилизируется к 1. В итоге получаем график процесса, представленного на рисунке 3.
рис. 3
2.3.3. Ступенчатое изменение нагрузки.
В этом процессе уставка и начальные условия равны нулю. Система реагирует только на изменение нагрузки. В итоге получается график процесса, представленного на рисунке 4.
рис. 4
2.4. Сопоставление полученных результатов с моделью, построенной в среде Matlab.
Для проверки результатов работы Simulink в среде необходимо использовать функции step и initial.
2.4.1. Отработка ненулевых начальных условий.
Для моделирования этого
процесса существует специальная функция initial, в нее подставляется сама модель с матрицей ![]() замкнутой системы и вектор
начального состояния.
замкнутой системы и вектор
начального состояния.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.