Исходным состоянием для геометрического синтеза следует считать такое положение, когда выбрана кинематическая структуры МС, т.е. определено число степеней подвижности, их состав и последовательность расположения.
Обозначим варьируемые параметры звеньев МС через α1, α2,…, αm и будем полагать, что каждому набору параметров αi можно поставить в соответствие определенный показатель качества К(α1, α2,…, αm). Тогда задача геометрического синтеза формулируется как экстремальная: требуется отыскать экстремум функции:
К(α1, α2,…, αm)→extr
при наличии определенных ограничений, накладываемых на МС условиями техпроцесса, под который проектируется МС.
К геометрическим характеристикам промышленных роботов относят: рабочее пространство, рабочую зону, зону обслуживания, маневренность, достижимость, манипулятивность.
Рабочее пространство – множество точек, с которыми может совпадать хотя бы одна точка исполнительного устройства промышленного робота.
Рабочая зона – подмножество точек рабочего пространства, с которыми может совпадать конечная точка исполнительного устройства при его функционировании.
Зона обслуживания – часть рабочей зоны, в которой рабочий орган исполнительного устройства выполняет заданные функции.
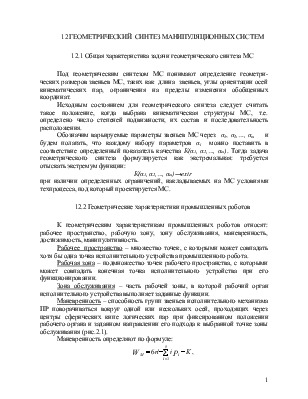
Маневренность – способность групп звеньев исполнительного механизма ПР поворачиваться вокруг одной или нескольких осей, проходящих через центры сферических кипе логических пар при фиксированном положении рабочего органа и заданном направлении его подхода к выбранной точке зоны обслуживания (рис.2.1).
Маневренность определяют по формуле:
 , где n'=(n-1) - число подвижных звеньев
исполнительного механизма без учета рабочего органа; К - число местных
подвижностей звеньев (возможность поворота звеньев вокруг своих продольных
осей).
, где n'=(n-1) - число подвижных звеньев
исполнительного механизма без учета рабочего органа; К - число местных
подвижностей звеньев (возможность поворота звеньев вокруг своих продольных
осей).
Рис. 1
Для механизма, изображенного на рис.1, маневренность равна:
WM = 6*2-3*3-2= 1.
Маневренность равная единице означает групповую подвижность звеньев 1 и 2 вокруг одной оси АС, проходящей через центры сферических пар А и С и обеспечивает подход рабочего органа к точке Е в заданном направлении N-N при любом положении группы звеньев 1 и 2, полученном в результате их поворота вокруг оси АС. Два таких положения звеньев АВ'С и АВ"С показаны на рис.2.1 пунктирными линиями.
Маневренность равная m означает подвижность m групп звеньев исполнительного механизма вокруг m осей, проходящих через центры сферических кинематических пар, и обеспечивает подход рабочего органа к заданной точке в выбранном направлении при любом положении этих групп.
Оптимальная достижимость. Под достижимостью МС понимают способность МС совмещать центр схвата с точками пространства, что характерно для операции позиционирования.
В частности, границы рабочего пространства являются границами достижимости. Достижимость тех или иных точек рабочей зоны зависит в пределах заданной кинематической структуры от геометрических параметров и кинематических ограничений МС.
Объем рабочей зоны охватывает все достижимые точки. Поэтому мерой достижимости МС принято считать величину объема РЗ. Объем V РЗ, как оценка достижимости предполагает равноправность точек РЗ.
Критерий "достижимости" позволяет принимать решение о предпочтительности одного набора геометрических параметров МС перед другими.
Величина объема рабочей зоны зависит от абсолютных размеров звеньев МС: достижимость тем выше, чем длиннее ее звенья. Поэтому об оптимальной достижимости можно говорить при наличии дополнительного условия, наложенного на полную длину кинематической цепи МС. Здесь возникают задачи определения оптимальных соотношений длин звеньев, ограничений подвижности в кинематических парах.
Наиболее
общей с теоретической точки зрения является ситуация, когда каждой точке РЗ ![]() ,
соотнесен некоторый "коэффициент значимости" р(
,
соотнесен некоторый "коэффициент значимости" р(![]() )
(например р(
)
(например р(![]() )
- относительная частота позиционирования схвата в точке
)
- относительная частота позиционирования схвата в точке ![]() ). Тогда
оценку достижимости можно строить по взвешенному критерию:
). Тогда
оценку достижимости можно строить по взвешенному критерию:
Vp=![]()
![]() I(Do,
I(Do,![]() )p(
)p(![]() )d
)d![]()
где I(Do,![]() ) - разрывная функция, равная 1 при
) - разрывная функция, равная 1 при![]() ÎDo (Do - множество точек позиционирования),
и 0 при
ÎDo (Do - множество точек позиционирования),
и 0 при ![]() ÏDo, называемая индикатором Do.
ÏDo, называемая индикатором Do.
Манипулятивность – возможность подхода захватного устройства МС к заданной точке РЗ с различных пространственных направлений и дает представление о двигательных возможностях МС в окрестности данной точки РЗ. Манипулятивность характеризует возможность выполнения манипулятором операции ориентирования объекта в заданной точке РЗ.
Манипулятивность МС оценивается коэффициентом сервиса, который в свою очередь связан с углом сервиса.
Угол сервиса – телесный угол, внутри которого может находиться ось рабочего органа при его подходе к заданной точке зоны обслуживания (рис.2).
Рис.2 Рис.3
При этом точка С опишет шаровой сегмент радиуса
R=EC=l3.
Угол сервиса определяют в виде отношения:

SШС – площадь шарового сегмента, вырезанного телесным углом;
l3 – радиуса сферы
Площадь шарового сегмента (рис.3) равна:
 .
.
Тогда угол сервиса будет равен:
![]() .
.
Если точка С описывает фигуру, отличную от шарового сегмента, то ее площадь находят по соответствующим зависимостям.
В предельном случае при φmax = 180° площадь шарового сегмента равна
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.