



Настройка адаптивного управления.
Цель работы: изучить процессы и способы адаптации в цифровых системах автоматического регулирования
6.1.1. Адаптивные системы управления применяют для объектов, динамические свойства которых сильно изменяются. В таких условиях регулятор автоматической системы должен учитывать эти изменения, чтобы обеспечивать хорошее качество регулирования.
Процесс адаптации в системах управления с регуляторами этого типа проходит в два этапа:
1. Идентификация объекта (учет изменений динамики).
2. Расчет регулятора.
6.1.2. Задача идентификации объекта состоит в определении параметров математической модели, которая повторяла бы поведение объекта в динамике. Для моделирования динамики объекта применяют, например, дискретную передаточную функцию.
Алгоритм идентификации должен определить такие параметры модели (θ(k) = a1,a2,b1,b2), при которых её динамические свойства совпадали бы динамическими свойствами объекта, а параметры модели можно считать параметрами объекта.
Разработаны алгоритмы идентификации, требующие небольших затрат вычислительных ресурсов. В данной лабораторной работе используется текущая идентификация в реальном времени рекуррентным методом оценивания параметров модели.

 |
Рис.6.1. Алгоритм текущей идентификации в реальном времени
На каждом такте по параметрам θ(k) = [a1,a2,b1,b2] вычисляется расчетный выход модели и сравнивается с измеренным значением y(k) объекта. При несовпадении расчета и измерения параметры θ(k+1) = [a1,a2,b1,b2] корректируются для расчета на последующем такте. При совпадении расчета и измерения параметры модели можно считать параметрами объекта и передать их для расчета регулятора.
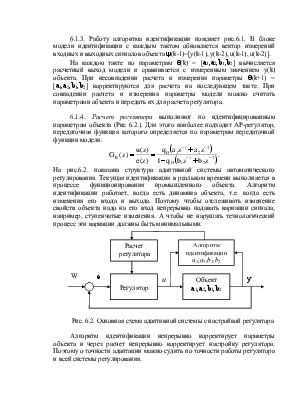
6.1.4. Расчет регулятора выполняют по идентифицированным параметрам объекта (Рис 6.2.). Для этого наиболее подходит АР-регулятор, передаточная функция которого определяется по параметрам передаточной функции модели.
На рис.6.2. показана структура адаптивной системы автоматического регулирования. Текущая идентификация в реальном времени выполняется в процессе функционирования промышленного объекта. Алгоритм идентификации работает, когда есть динамика объекта, т.е. когда есть изменения его входа и выхода. Поэтому чтобы отслеживать изменение свойств объекта надо на его вход непрерывно подавать вариации сигнала, например, ступенчатые изменения. А чтобы не нарушать технологический процесс эти вариации должны быть минимальными.
Рис. 6.2. Основная схема адаптивной системы с настройкой регулятора
Алгоритм идентификации непрерывно корректирует параметры объекта и через расчет непрерывно корректирует настройку регулятора. Поэтому о точности адаптации можно судить по точности работы регулятора и всей системы регулирования.
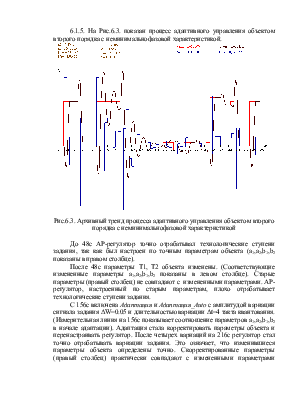
6.1.5. На Рис.6.3. показан процесс адаптивного управления объектом второго порядка с неминимальнофазовой характеристикой.
Рис.6.3. Архивный тренд процесса адаптивного управления объектом второго порядка с неминимальнофазовой характеристикой
До 48с АР-регулятор точно отрабатывал технологические ступени задания, так как был настроен по точным параметрам объекта (a1,a2,b1,b2 показаны в правом столбце).
После 48с параметры Т1, Т2 объекта изменены. (Соответствующие измененные параметры a1,a2,b1,b2 показаны в левом столбце). Старые параметры (правый столбец) не совпадают с измененными параметрами. АР-регулятор, настроенный по старым параметрам, плохо отрабатывает технологические ступени задания.
С 156с включена Адаптация и Адаптация_Auto с амплитудой вариации сигнала задания ΔW=0.05 и длительностью вариации Δt=4 такта квантования. (Измерительная линия на 156с показывает соотношение параметров a1,a2,b1,b2 в начале адаптации). Адаптация стала корректировать параметры объекта и перенастраивать регулятор. После четырех вариаций на 216с регулятор стал точно отрабатывать вариации задания. Это означает, что изменившиеся параметры объекта определены точно. Скорректированные параметры (правый столбец) практически совпадают с измененными параметрами (левый столбец). После 216с регулятор точно отрабатывает технологические ступени задания при измененных параметрах объекта.
6.1.6. На Рис.6.4. показан процесс адаптивного управления объектом третьего порядка.
После 48с параметры объекта изменились, и точность регулирования ухудшилась.
На 96с включена Адаптация без Адаптация_Auto . Теперь при отработке технологических ступеней задания алгоритм адаптации видит изменившуюся динамику объекта и корректирует его параметры.
На 168с измерительная линия показывает приближение определяемых параметров (справа) к измененным параметрам объекта (слева).
На 228с . . . 288с параметры практически совпали, а процесс регулирования стал точным, т.е. адаптация закончилась.
Рис.6.4. Архивный тренд процесса адаптивного управления объектом третьего порядка
6.2.1. Запустите программу Katusha, выберите заданный объект, по переходной характеристике объекта выберите такт квантования системы. Сохраните график переходной характеристики объекта. Запишите параметры передаточной функции объекта a1,a2,b1,b2 для выбранного такта квантования..
Варианты заданий.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.