Этот объект можно представить как три последовательно
соединенных звена -инерционное, инерционно-дифференцирующее и звено чистого
запаздывания.
представить как три последовательно
соединенных звена -инерционное, инерционно-дифференцирующее и звено чистого
запаздывания.
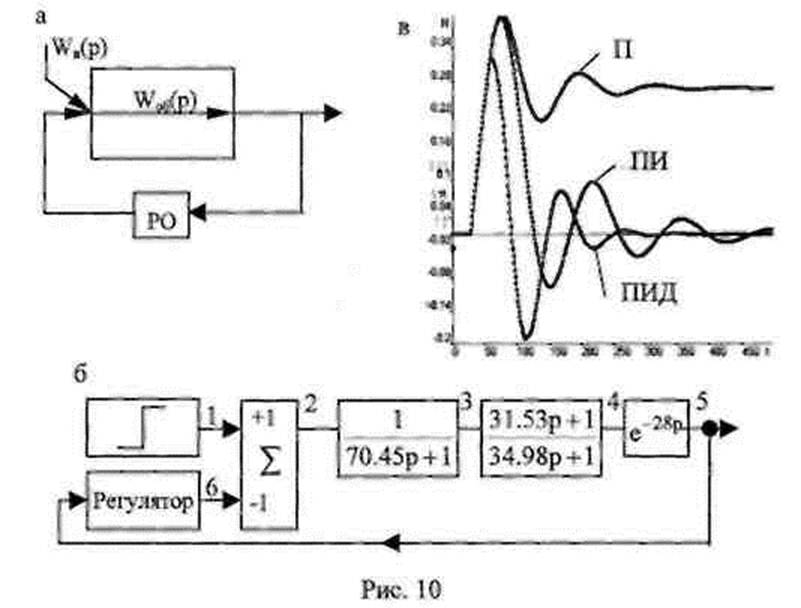
Возможны два случая возмущающего воздействия на объект управления. В первом случае возмущение наносится на вход объекта регулирования, где суммируется с управляющим воздействием (рис. 10, а).
Составим таблицу звеньев (табл. 2) и таблицу данных (табл. 3) для одноконтурной АСР с возмущающим воздействием на вход объекта регулирования на базе декомпозированной системы регулирования. Для этого воспользуемся блок-схемой алгоритма моделирования переходного процесса (рис. 10, б).
|
№ звена |
1 |
2 |
3 |
4 |
5 |
6 |
|
Кол звена |
12 |
9 |
2 |
7 |
13 |
6 |
|
№ входа 1 |
0 |
1 |
2 |
3 |
4 |
5 |
|
№ входа 2 |
0 |
6 |
0 |
0 |
0 |
1 о |
|
№ звена |
1 |
2 |
3 |
4 |
5 |
6 |
|
Данные 1 |
1 |
1 |
1 |
1 |
28 |
3.5 |
|
Данные 2 |
0 |
-1 |
70.45 |
31.53 |
0 |
70 |
|
Данные 3 |
0 |
0 |
0 |
34.98 |
0 |
0 |
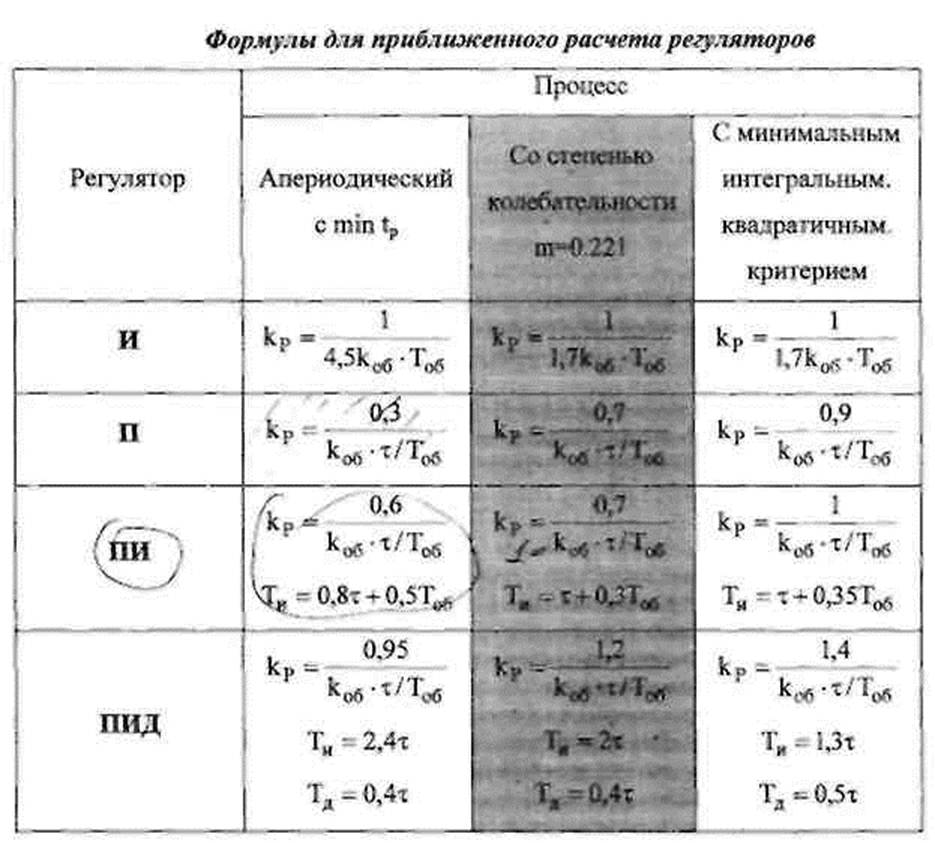
В приведенном примере в выделенных столбцах таблиц расположены данные для ПИ-ре гул я тора. Для того, чтобы получить различные варианты переходных процессов в одноконтурной АСР в выделенных столбцах достаточно поменять
код звена (регулятора) (табл. 2) и занести соответствующие значения параметров настройки данного регулятора в табл. 3.
Из таблицы данных можно с приближенной точностью определить величину шага интегрирования, умножив минимальную постоянную времени на 0,1, и вычислить время интегрирования. Для этого максимальную постоянную времени нужно увеличить в пять - шесть раз.
Результат моделирования переходных процессов в одноконтурной АСР с возмущающим воздействием на вход объекта с различными регуляторами приведен на рис. 10, в.
Во втором случае воздействие на объект может наноситься в любую промежуточную точку, при этом суммирование сигнала, поступающего по каналу возмущения, с сигналом, проходящим через объект регулирования, происходит как бы на выходе системы управления (рис. 11, а). Чтобы учесть характер данного возмущения в одноконтурной АСР, необходимо внести соответствующие изменения в блок-схему алгоритма переходного процесса, как это показано на рис. 11,6.
|
№ звена |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Код звена |
12 |
2 |
13 |
9 |
6 |
2 |
2 |
13 |
|
№ входа 1 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
№ входа 2 |
0 |
1 о | |
1 о |
8 |
0 |
0 |
0 |
0 |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Данные 1 |
1 |
1 |
2,8 |
+ 1 |
2,75 |
1 |
1 |
28 |
|
Данные 2 |
0 |
70,45 |
0 |
-! |
65 |
70,45 |
31,53 |
0 |
|
Данные 3 |
0 |
0 |
0 |
0 |
0 |
0 |
34,98 |
0 |
Здесь также в выделенных столбцах табл. 4 и 5 приведены данные для ПИ-регулятора. Чтобы получить результаты моделирования переходных процессов в одноконтурной АСР с другими типами регуляторов, нужно поменять код регулятора в табл. 4 и записать его параметры настройки в табл. 5.
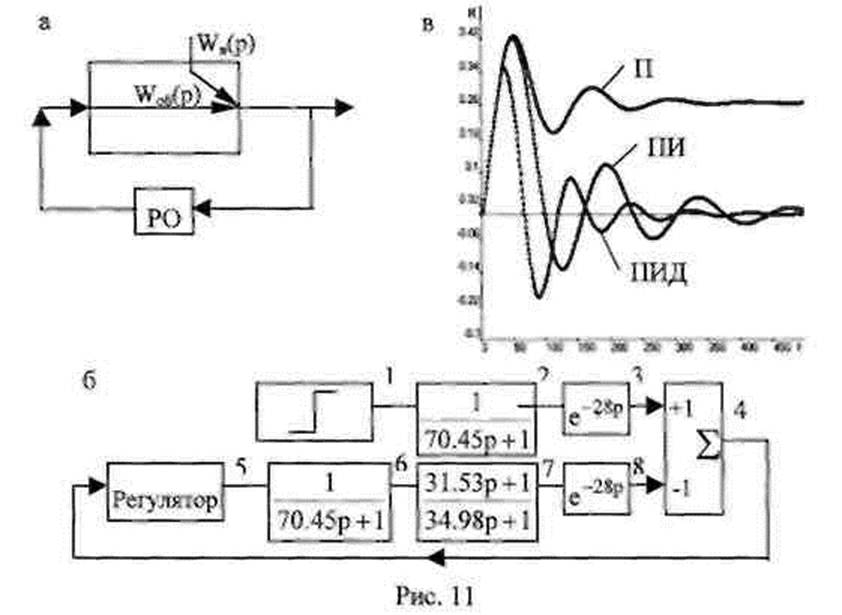
Результат моделирования переходных процессов в одноконтурной АСР с нанесенным возмущающим воздействием в промежуточную точку при использовании различных регуляторов приведен на рис. 11, в.
![]() 8. Оценка эффективности работы
различных регуляторов в одноконтурной АСР
по величине динамического коэффициента регулирования
8. Оценка эффективности работы
различных регуляторов в одноконтурной АСР
по величине динамического коэффициента регулирования
Степень воздействия регулятора, понижающего динамическое отклонение, характеризуется динамическим коэффициентом регулирования Кд, который представляет собой отношение максимального отклонения регулируемой величины от заданного значения hi в переходном процессе регулирования, вызванном каким-либо однократным скачкообразным возмущением, к отклонению от заданного значения при том же возмущении, но без регулирующего воздействия:
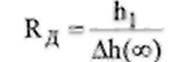
Величина потенциального отклонения от заданного значения ДЬ(со) характеризует свойства объекта регулирования и величину возмущения. Очевидно, что Дп(со) = кобУв, где коб- коэффициент передачи объекта, ув - величина возмущения. Анализируя графики зависимости динамического коэффициента регулирования Яд от величины отношения т/Т (динамические свойства объекта) для АСР с регуляторами непрерывного действия, можно сделать следующие выводы. Динамический ...коэффициент регулирования, а значит, и .максимальное динамическое отклонение регулируемой величины от заданного значения всегда больше, если используется И-регулятор. Использование П- и ПИ-регуляторов для аналогичных процессов позволяет значительно уменьшить величину динамического коэффициента регулирования. И, наконец, наилучшее - минимальное - значение Яд можно получить, используя ПИД-регулятор. Для переходных процессов с 20%-м перерегулированием при различных значениях отношения т/Т сведены в табл. 6.
Таблица 6
|
хГТ |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,8 |
1 |
|
Клгп/ Кд(щ |
0,33 |
0,46 |
0,57 |
0,65 |
0,72 |
0,9 |
0,95 |
|
»М1«ШУ Кл(И1 |
0,29 |
0,42 |
0,53 |
0,63 |
0,7 |
0,88 |
0,94 |
|
Кдшилу Rnmm |
0,64 |
0,72 |
0,78 |
0,8 |
0,8 |
0,8 |
0,81 |
При анализе приведенных данных видно, что для ПИД-регуляторов при малых значениях т/Т (от 0,1 до 0,2) можно уменьшить максимальное отклонение в 1,5 раза, а при ббльших значениях т/Т - только на 25 - 30%.
Общей тенденцией для всех типов регуляторов является то, что с увеличением отношения т/Т динамический коэффициент регулирования стремится к единице, т. е. эффективность работы регуляторов резко снижается. Приведенные значения функции Яд = У(т/Т) позволяют рассчитывать один из основных критериев качества регулирования - максимальное динамическое отклонение регулируемой величины.
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.