

































Министерство образования Республики Беларусь
Гомельский государственный технический университет
им. П. О. Сухого
Кафедра «Промышленная электроника»
Курсовой проект
по дисциплине:
«Микропроцессорная техника»
на тему:
«Проектирование микропроцессорной системы
контроля и управления объектом»
Защита:
Выполнил: студент гр. ПЭ-41
Принял: доцент
ГОМЕЛЬ 2005
2.6 Модуль вывода аналоговых сигналов.______________________________19
2.7 Модуль дисплея, сигнализации и пульта управления._________________22
Приложение
1. Перечень элементов._____________________________________39
ВВЕДЕНИЕ
Классический метод наблюдения за длительными процессами – применение самопишущих приборов, которые регистрируют измеряемую величину на каком-либо носителе (обычно на бумажной координатной ленте). Альтернативой такому подходу является применение цифровых систем сбора данных на базе микропроцессоров или однокристальных микроЭВМ для контроля и записи (хранения) измеряемой величины.
При втором подходе в микроконтроллере измеряемый сигнал преобразуется в цифровую форму, затем обрабатывается и записывается в запоминающее устройство. Основные достоинства такой системы :
· резкое сокращение расходных материалов (например, чернил и бумаги),
· уменьшение массогабаритных показателей,
· возможность наблюдения большого числа сигналов одним многоканальным микроконтроллером,
· отсутствие в микроконтроллере подвижных механических частей,
· почти неограниченные возможности по обработке измеряемого сигнала (например, допусковый контроль предельных значений, ведение статистики, определение динамических параметров сигнала, уплотнение и ‘упаковка’ сигнала для передачи его по каналу связи с недостаточной пропускной способностью и т. д.),
· возможность полной автоматизации процесса измерений.
Конечно, в тех случаях, когда требуется документальное подтверждение контролируемых процессов (например, ответственные участки техпроцесса на производстве, мониторинг работы ядерного реактора) классические регистрирующие приборы остаются незаменимыми. Но на практике существует масса возможностей для применения микроконтроллеров для наблюдения и измерения параметров различных процессов.
В данном курсовом проекте осуществляется разработка микропроцессорной системы управления технологическим объектом, выбор и расчет элементов системы, разработка ее программного обеспечения, составление структурных, функциональных и принципиальных схем.
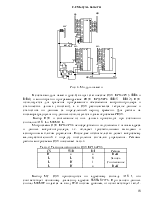
Структурная схема контроллера изображена на рис.1. Устройство состоит из следующих основных блоков: модуль микропроцессора, модуль памяти, пульт оператора, модуль ввода-вывода аналоговых сигналов, модуль прерывания, модуль вывода импульсов. Модуль микропроцессора состоит из микропроцессора КР580ВМ85А (микросхема DD2), Вспомогательные микросхемы используются серии КР1533. Микросхемы DD2, DD3 выполняют роль формирователей сигналов шины адреса А0–А15, а DD4 служит для формирования двунаправленной шины данных D0–D7. Все структурные блоки микроконтроллера подключаются на общую шину данных. Модуль памяти выполняется на микросхемах постоянной (ПЗУ) и оперативной (ОЗУ) памяти. ПЗУ предназначено для хранения программного обеспечения микроконтроллера и данных для начальной инициализации, в ОЗУ располагаются текущие данные программы.
МК с требуемой периодичностью вырабатывает управляющие сигналы на своих выходных портах в соответствии с законом управления. Некоторая часть управляющих сигналов интерпретируется как совокупность простых двоичных сигналов управления, которые через схемы формирователей сигналов (усилители мощности, реле, оптроны и т.п.) поступают на исполнительные устройства. Другая часть управляющих сигналов представляет собой многоразрядные двоичные коды, которые через цифро-аналоговые преобразователи (ЦАП) воздействуют на исполнительные устройства аналогового типа. С помощью пульта управления (ПУ) оператор получает возможность управлять работой МПС: запускать ее и останавливать, выдавать значение некоторых сигналов, снимать с индикаторов информацию о состоянии объекта и т.п.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.