СПЕЦИАЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
Методические указания
к контрольным работам по одноименной дисциплине
для студентов специальности 1-53 01 05
«Автоматизированные электроприводы» заочной формы обучения
Электронный аналог печатного издания
Тахогенераторами называют электрические микромашины, работающие в генераторном режиме и служащие для преобразования скорости вращения в пропорциональный электрический сигнал. При этом закон преобразования определяется выходной характеристикой тахогенератора, т. е. зависимостью между входной величиной – скоростью вращения вала ω и выходной – напряжением Uвых в выходной обмотке.
Уравнение выходной характеристики идеального тахогенератора в общем случае
dθ
Uвых = kусω=
kус ![]() , (1)
dt
, (1)
dt
где kус(s) – статический коэффициент усиления (крутизна выходной характеристики [В/об/мин]); θ – угол поворота ротора тахогенератора.
Уравнение (1) показывает, что тахогенератор можно использовать для электромеханического дифференцирования, если функцию задавать в виде угла поворота ротора.
Конструкция тахогенераторов практически не отличается от конструкции соответствующих типов электрических микродвигателей.
По конструкции и принципу действия тахогенераторы можно подразделить на три основные группы: постоянного тока, асинхронные и синхронные переменного тока.
Основные требования, предъявляемые к тахогенераторам, состоят в следующем:
1) минимальная амплитудная погрешность, под которой понимают отклонение выходной характеристики от линейной зависимости;
2) минимальная фазовая погрешность, под которой понимают изменение фазы выходного напряжения при изменении режима работы;
3) максимальный коэффициент усиления;
4) малый момент инерции ротора;
5) малая электромагнитная постоянная времени.
Величина амплитудной погрешности ΔU определяется как разность между выходным напряжением, соответствующим данной скорости вращения при идеальной выходной характеристике, и действительным выходным напряжением.
Величина фазовой погрешности Δβ определяется как разность между углом β сдвига векторов напряжения возбуждения и выходно-
го напряжения идеального тахогенератора, у которого β не зависит от скорости вращения, и действительным углом.
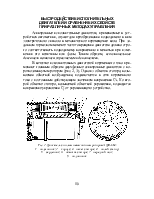
Тахогенераторы постоянного тока по принципу действия и конструктивному оформлению представляют собой электрические коллекторные машины постоянного тока с независимым электромагнитным (рис. 1, а) или магнитоэлектрическим возбуждением.
Выходной характеристикой тахогенератора постоянного тока является зависимость величины напряжения на зажимах якоря U от скорости вращения якоря ω при постоянном магнитном потоке возбуждения Φ и постоянном сопротивлении нагрузки Rнагр. Из теории электрических машин известно, что величина ЭДС якоря Eя прямо пропорциональна магнитному потоку возбуждения и скорости вращения якоря. Значит, при постоянном магнитном потоке можно записать:
dθ
Eя
= kEω= kE ![]() , (2)
, (2)
dt
где kE – постоянная машины, равная kΦ; k – конструктивный коэффициент; θ – угол поворота якоря тахогенератора.
Выражение (2) – это уравнение выходной характеристики тахогенератора постоянного тока при холостом ходе, т. е. при разомкнутой цепи якоря. Данная линейная зависимость показана на рис. 1, б (для Rнагр = ∞). Значения скорости ω взяты в относительных единицах.
При подключении обмотки якоря к зажимам прибора или устройства с конечной величиной входного сопротивления и при постоянстве магнитного потока возбуждения выходное напряжение будет меньше ЭДС якоря на величину падения напряжения в цепи якоря:
Uя = Eя − IяRц.я, (3) где Iя – ток якоря; Rц.я – сопротивление цепи якоря, равное сумме сопротивлений обмотки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.