

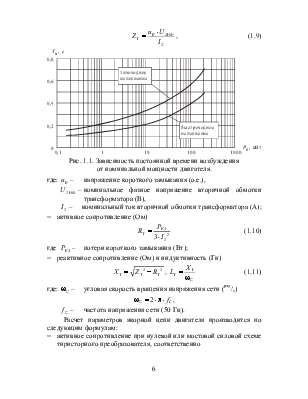

















где: ωС – угловая скорость вращения напряжения сети (рад/с)
ωC = 2⋅π⋅ fC,
fC – частота напряжения сети (50 Гц).
Расчет параметров якорной цепи двигателя производится по следующим формулам:
– активное сопротивление при нулевой или мостовой силовой схеме тиристорного преобразователя, соответственно
RЯ = RЯД + RТ + RК,
|
RЯ = RЯД + 2⋅ RТ + RК |
(1.12) |
|
|
где RК – |
коммутационное сопротивление |
|
|
p⋅ X RК = |
(1.13) |
2⋅π
где p – количество пульсаций выпрямленного напряжения за период сети ( p = 2 для однофазной мостовой, p = 3 для трехфазной нулевой и p = 6 для трехфазной мостовой схемы выпрямления);
– индуктивность при нулевой или мостовой силовой схеме тиристорного преобразователя, соответственно
LЯ = LЯД + RТ,
|
LЯ = LЯД + 2⋅ LТ . – постоянная времени якорной цепи |
(1.14) |
|
L TЯ = Я . RЯ – постоянная времени преобразователя (c) |
(1.15) |
|
1 TТП = p⋅fС |
(1.16) |
– коэффициент передачи преобразователя
E ⋅π ⎛ ⎛ U ⎞⎞
|
|
|
|
где: Ed0 – |
максимальное значение ЭДС преобразователя |
|
Ed0 = kСХ ⋅U2НФ; (1.18) |
|
|
kСХ – |
схемный коэффициент силовой цепи преобразователя |
(для однофазной мостовой схемы kСХ = 0,9 , для трехфазной нулевой kСХ =1,17 и для трехфазной мостовой kСХ = 2,34);
UОП MAX – амплитуда пилообразного опорного напряжения СИФУ.
Для механизмов передвижения металлорежущих станков и реверсивных конвейеров необходимо выбирать двухзонную систему, поскольку для повышения производительности механизма обратный ход целесообразно осуществлять при повышенной скорости, выше номинальной. Для привода главного движения токарных станков в ряде случаев требуется стабилизация мощности резания, поэтому также желательно применение двухзонной системы. В остальных случаях следует выбирать однозонную систему управления.
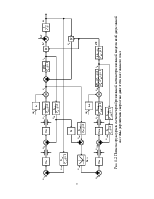
Количество контуров в якорном канале системы управления выбирается следующим образом: если возможен режим работы “на упор” или требуется ограничение тока двигателя в переходных процессах, то следует применять 2 контура регулирования (внутренний контур тока якоря и внешний контур скорости). В канале управления возбуждением всегда следует применять 2 контура (внутренний контур регулирования тока возбуждения и внешний контур ЭДС якоря).
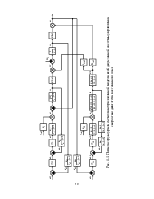
Полная структурная схема всей системы управления с двумя контурами регулирования в якорном канале приведена на рис. 1.2. Структурная схема линеаризованной модели, используемая для синтеза контуров регулирования – на рис. 1.3.
Параметры двигателя и преобразователей уже определены.
Коэффициенты влияния сетевого напряжения определяются видом силовой схемы соответствующего преобразователя и имеют значение, обратное схемному коэффициенту
1
Выбираем вначале номинальные значения сигналов задания всех регулируемых переменных: скорости UЗСН , тока якоря UЗТН , ЭДС якоря UЗЕН , тока возбуждения UЗТВН . Выбирать номинальные значения следует так, чтобы максимально возможное значение сигнала не превышало напряжения насыщения операционного усилителя. Т.е. для двухзонной системы управления максимальное значение сигнала задания скорости соответствует максимальной скорости двигателя ωMAX . Максимальное значение напряжения задания тока якоря соответствует допустимому току двигателя с учетом его перегрузочной способности. Исходя из принципа двухзонного регулирования, в канале возбуждения переменные ограничены на уровне номинальных значений.
Требуемые коэффициенты передачи обратных связей определяются выбранными номинальными значениями сигналов задания и номинальными значениями соответствующих переменных
UЗТН UЗСН
KОТ = ![]() ,
KОС =
,
KОС = ![]() ,
,
IН ωН
![]() UЗТВН UЗЕН UЗЕН UЗЕН
UЗТВН UЗЕН UЗЕН UЗЕН
KОТВ = ![]() , KОН =
, KОН = ![]() , KОЕ = = . (1.20)
IВН UН EЯН kΦН ⋅ωН
, KОЕ = = . (1.20)
IВН UН EЯН kΦН ⋅ωН
Коэффициенты передачи в канале обратной связи по ЭДС определяются следующим образом:
– коэффициент согласования в канале обратной связи по току
KОН ⋅ RЯ
KОТ
– коэффициент передачи выделителя модуля
KОЕ
KОН
Определение постоянных времени датчика напряжения TДН и фильтра в цепи обратной связи по току возбуждения TФ будут рассмотрены позднее, при синтезе соответствующих контуров регулирования. Остальные постоянные: TДС , TДТ , TДТВ – определяются реализацией соответствующих датчиков в выбранном комплектном электроприводе. При отсутствии фильтра в канале обратной связи соответствующая постоянная времени принимается равной нулю.
Выбор начальных значений координат в рабочей точке kΦНАЧ и
ΩНАЧ , принимаемых для настройки, будет рассмотрен позже, в разделе синтеза контуров регулирования.
Для синтеза контуров регулирования систем подчиненного управления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.