Рассмотрим плоский кулачковый механизм с поступательно движущимся толкателем
(рис. 5.12). Ограничимся определением компонент реакций, действующих в
плоскости движения. Уравнения кинетостатики, составленные для толкателя и
кулачка, разделяются и могут решаться независимо. Составим уравнения кинетостатики
для толкателя. Силы, действующие на толкатель со стороны кулачка, сводятся к
силе ![]() , направленной по
нормали к профилю кулачка в рассматриваемом положении, и силе трения
, направленной по
нормали к профилю кулачка в рассматриваемом положении, и силе трения ![]() . Выберем модель
поступательной пары с двухточечным контактом; силы
. Выберем модель
поступательной пары с двухточечным контактом; силы ![]() ,
, ![]() и соответствующие силы
трения
и соответствующие силы
трения ![]() и
и ![]() действуют на толкатель со
стороны стойки. Введем систему координат 02x2y2,
связанную с толкателем; в результате получаем уравнения кинетостатики в
следующем виде:
действуют на толкатель со
стороны стойки. Введем систему координат 02x2y2,
связанную с толкателем; в результате получаем уравнения кинетостатики в
следующем виде:
 (5.27)
(5.27)
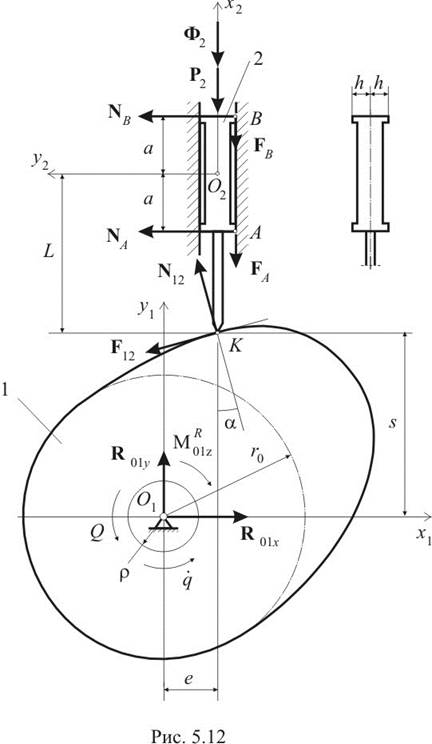 Здесь α и f1
– соответственно угол давления и коэффициент трения в высшей
кинематической паре К, f2 –
коэффициент трения в поступательной паре, P2
– рабочая нагрузка, Ф2 – сила инерции толкателя, а, h, L – геометрические
параметры, обозначенные на рисунке. Силы P2
и Ф2 считаются положительными, если они направлены так, как они
показаны на рисунке.
Здесь α и f1
– соответственно угол давления и коэффициент трения в высшей
кинематической паре К, f2 –
коэффициент трения в поступательной паре, P2
– рабочая нагрузка, Ф2 – сила инерции толкателя, а, h, L – геометрические
параметры, обозначенные на рисунке. Силы P2
и Ф2 считаются положительными, если они направлены так, как они
показаны на рисунке.
Система уравнений (5.27) является нелинейной: в ней присутствуют функции signN12, signNA, signNB, имеющие разрывы при N12=0, NA=0, NB=0. Уравнения станут линейными, если задать знаки неизвестных реакций. Предварительно выберем знаки N12, NA, NB такими, какими они получились бы в рассматриваемом положении механизма, если бы силы трения отсутствовали. Полагая f1 = 0, f2 = 0, получаем:
При заданном направлении сил P2 и Ф2 (эти силы прижимают толкатель к профилю кулачка) получаем N12 > 0, NA < 0, NB > 0 (если L > a). Подставив в уравнения кинетостатики signN12 = 1, signNA = –1, signNB = 1, приходим к системе линейных уравнений
 (5.28)
(5.28)
Из последних двух уравнений находим NA и NB:
![]()
![]() (5.29)
(5.29)
Если L > a + f2 h , то при N12 > 0 будет действительно NA < 0 и NB > 0. Подставим NA и NB в первое уравнение (5.28) и найдем из него реакцию N12:
 . (5.30)
. (5.30)
Если Р2 + Ф2 > 0, то реакция N12 останется положительной в системе с трением при выполнении условия
![]() .
(5.31)
.
(5.31)
При увеличении угла давления α или коэффициентов трения f1 и f2 значение σ уменьшается; при cosα = f1sin α, т.е. при ctg α = f1 она наверняка становится отрицательной. С уменьшением σ увеличивается значение |N12|, при σ = 0 реакция становится «бесконечно большой», что свидетельствует о заклинивании механизма. Значения σ, при которых N12 < 0, вообще не должны рассматриваться, поскольку такое решение не удовлетворяет тем условиям, при которых были получены уравнения (5.28). Могут ли исходные уравнения (5.27) иметь решение, в котором N12 < 0 при Р2 + Ф2 > 0? Если при этом принять, что NA>0, NB<0, то из (5.27) получаем
 (5.32)
(5.32)
Из последних двух уравнений находим:
![]()
![]() (5.33)
(5.33)
Полагая, что N12 < 0, sin α > f1cos α (сtg α < f1), получаем, действительно, NA > 0, NB < 0. Подставив (5.33) в первое уравнение (5.32), имеем:
 . (5.34)
. (5.34)
Это уравнение, а следовательно, и исходная система не может иметь решение N12 < 0 при Р2 + Ф2 > 0, какими бы ни были значения α и f2. Таким образом, при σ < 0 исходная система уравнений вообще не имеет решений, если Р2+Ф2>0.
Пусть Р2 + Ф2 < 0,
т.е. предположим, что направление суммарной силы совпадает с направлением
скорости толкателя ![]() . Может ли
система уравнений (5.27) иметь при этом решение, в котором N12
> 0, NA
< 0, NB
> 0? Если L > a
+ f2h,
то для определения N12 вновь
получаем выражение (5.30), из которого следует, что при σ
< 0 и Р2 + Ф2 < 0 будем иметь N12 > 0, а тогда в силу соотношений (5.29)
имеем NA <
0, NB > 0.
. Может ли
система уравнений (5.27) иметь при этом решение, в котором N12
> 0, NA
< 0, NB
> 0? Если L > a
+ f2h,
то для определения N12 вновь
получаем выражение (5.30), из которого следует, что при σ
< 0 и Р2 + Ф2 < 0 будем иметь N12 > 0, а тогда в силу соотношений (5.29)
имеем NA <
0, NB > 0.
Таким образом, при выполнении условия σ < 0 движение возможно, если сумма рабочей нагрузки и силы инерции направлена по скорости, т.е. играет роль движущей силы. Это – режим оттормаживания, о котором уже говорилось ранее.
Возможно и другое решение, в котором N12 < 0, NA > 0, NB < 0. Действительно, при таких знаках реакций мы приходим к уравнениям (5.32), а затем – к выражению (5.34), из которого при Р2 + Ф2 < 0 и при ctg α > f1 получается второе решение N12 < 0, поскольку выражение, стоящее в знаменателе, в этом случае положительно.
Существование двух режимов оттормаживания легко объяснить: в первом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.