После подстройки на рост пациента, врач настраивает устройство ширину груди и её «высоту» (места расположения точек).
Подстройка на индивидуальный размер производиться в ручную.
Врач ставит пациента необходимо стороной к устройству и, вращая рукоятку (поз 48) перемещает вначале плиту среднего уровня, затем – плиту нижнего. Перемещение обеспечивается винтом (поз.48), втулкой - гайкой (поз. 32). От вращения плиты предохраняют направляющие (поз. 40).
На ширину груди настройка так же происходит в ручную. Это связанно с необходимостью подстраиваться под несимметричное расположение точек съёма, вызванные особенностями антропометрии пациента.
Возможность приспособления устройства под особенности рельефа человеческого тела обеспечивает узел перемещения приёмника звуковой информации. (БНТУ 13.18.06.100 ВО).
Сигнал на начало движения поступает от компьютера к электродвигателю (поз. 13) через соединитель (поз.8). Вращение вала электродвигателя (поз.13) передаётся валу (поз.14) посредством полумуфт (поз.23), штифтов (поз.11) и упругой звёздочки (поз.16). Вращаясь в подшипниках (поз.6), вал с помощью резьбы превращает вращение вокруг своей оси в поступательное перемещение гайки (поз.15), жёстко вделанной в корпус (поз.20). В корпусе (поз.20) через гайку (поз.16) крепится корпус микрофона (поз.19). Движение корпуса (поз.20) продолжается до тех пор, пока резиновая насадка (поз.24) не войдет в контакт с поверхностью тела человека. Как только резиновая насадка (поз.24) войдёт в контакт с поверхностью, она начнёт деформироваться, что приведёт к передаче поступательного движения штифту (поз.26). Преодолевая действие пружины (поз.7), штифт (поз.26) краснеться ключа микропереключателя (поз.5), что приведёт к изменению уровня EN A, и двигатель остановиться. После проведения съёма информации компьютер даёт команду на отвод датчика от тела пациента. Электродвигатель (поз.13) начинает вращение в обратную сторону, чем вызывает возвратное движение корпуса (поз.20) и, следовательно, отвод датчика от тела пациента. При отходе корпус (поз.20) действует на ключ микропереключателя (поз.5), чем вызывает изменение уровня какала EN A и, следовательно, остановку двигателя.
Управление электродвигателем осуществляется по следующей схеме: на канал IN1 мостовой схемы L298N поступает 0, а на IN2 – 1 – двигатель начинает вращение против часовой стрелки, подводя датчик к пациенту; микропереключатель (поз.5) вызывает кратковременное изменение уровня канала EN A на низкий, что воспринимается компьютером по каналу RD и переводит IN1 равным 1, что вызывает остановку двигателя; после съёма информации компьютер по команде оператора делает IN2 равным 0, что заставляет выходной вал электродвигателя вращаться по часовой стрелке, отводя датчик от тела пациента.
Передача полученных данных осуществляется через один из каналов соединителя на вход устройства сопряжения через предварительный фильтр нижних частот с полосой пропускания до 2000Гц. Устройство сопряжения содержит управляемые фильтр и усилитель необходимые для обработки сигнала, АЦП – для перевода сигнала в цифровую форму, а так же ряд дополнительных устройств для получения и передачи информационного сигнала.
После обработки сигнала, благодаря наличию ПК, можно легко произвести его визуализацию, сохранение (как в электронной, так и на бумаге) в любой приемлемой форме. Параметры тревожной сигнализации должны задаваться программно.
Для выбора электродвигателя для перемещения приёмника звуковой информации определим необходимую для этого мощность. Для этого необходимо определить силы, возникающие при движении дорожки с пациентом на ней.
Схема действия сил представлена на рисунке 5.1
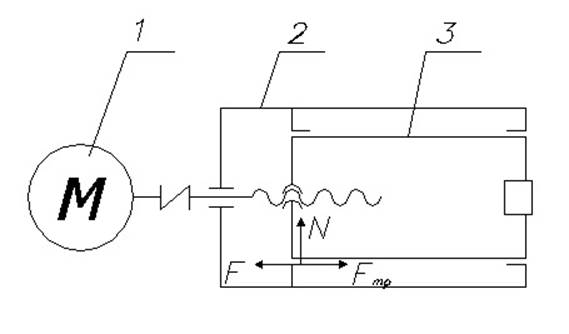
Рисунок 5.1 – Схема действия сил при движении датчика
На рисунке:
1 – двигатель
2 – неподвижный корпус
3 – подвижный корпус
Fтр – сила трения, возникающая при движении датчика
N – сила реакции корпуса, возникающая в результате действия веса подвижной части
F – Минимальная сила, развиваемая двигателем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.